Модем предназначен для организации связи по четырехпроводным некоммутируемым каналам тональной частоты и физическим линиям связи между контроллером МК-Д находящимся на КП, и ЭВМ на пункте управления. Модем обеспечивает работу в одном из двух форматов: по системе ЛИСНА или по протоколу Modbus (АСТМУ-А). Во всех форматах диапазон рабочих частот в канале связи от 300 до 3600 Гц. Используется частотная модуляция сигнала с двумя частотами Fh (нижняя частота) и Fb (верхняя частота). Модем осуществляет преобразование двоичных сигналов контроллера МК-Д в аналоговые сигналы линии связи и наоборот (рис. 19).
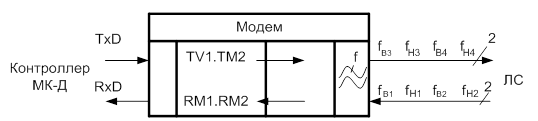
Рис. 19. Модем УКП
В режиме обмена данными по каналу связи по формату АСТМУ-А обеспечивается скорость передачи данных 1200 бит/с.
Для связи с контроллером МК-Д используется интерфейс RS-232 с параметрами блока данных для сигналов: ТС не более 64 байт, ТУ в формате ЛИСНА не более 40 байт, ТУ в формате АСТМУ-А не более 13 байт.
На лицевую панель модема-УКП выведены светодиодные индикаторы, индицирующие:
соответствие напряжения электропитания модуля норме - ПИТ;
нормальное функционирование программы модема - МИГ;
достаточность уровня входного сигнала в диапазоне частотного канала модема - УРОВ_СИГН;
прием модемом данных из канала связи - ПРМ-ЛИН;
передачу модемом данных в контроллер МК-Д - ПРД-RS;
прием модемом данных от контроллера МК-Д - ITPM-RS;
выдачу модемом в линию связи данных по первому и второму частотному каналу - ПРД-ЛИН_1 и ПРД-ЛИН_2.
Функциональная схема модема представлена на рис. 20. В состав платы модема-УКП входят: согласующие линейные цепи А1, модулятор-демодулятор (модем) А2, линейный выходной каскад A3, микропроцессорный контроллер (МПК) А4, переключатели задания режимов работы модуля А5, индикаторы состояний работы МПК А6, схема контроля напряжений электропитания А7, интерфейс RS-232 A8, интерфейс СЕРВИС А9, предварительный полосовой фильтр А10.
Согласующие линейные цепи А1 предназначены для согласования входного и выходного линейного сопротивления модема с сопротивлением канала связи в полосе частот от 300 до 3600 Гц. Пятипозиционный переключатель S1 подключает необходимое значение нормирующего входного сопротивления, а двухпозиционный переключатель S2 - нормирующее выходное сопротивление. Трансформаторы Т1 и Т2 осуществляют гальваническую развязку цепей модема от линии связи.
Модулятор-демодулятор А2 устроен следующим образом. Кроме модема, в состав модуля А2 входят: входной и выходной полосовые фильтры, детектор уровня входного аналогового сигнала, регулятор уровня аналогового выходного сигнала, выключатель сигнала, SPI-порт, цепи цифровых двоичных сигналов данных D (ТхМ и RxM) и управления С (RTC). Модулятор преобразует двоичные данных от контроллера А4 (сигнал ТсМ) в аналоговый частотно-модулированный сигнал. Демодулятор выполняет обратную функцию - преобразует аналоговый частотно-модулированный сигнал в двоичные данные (сигнал RxM) для контроллера А4. Цифровой сигнал RTC используется для включения и выключения выходного аналогового сигнала.
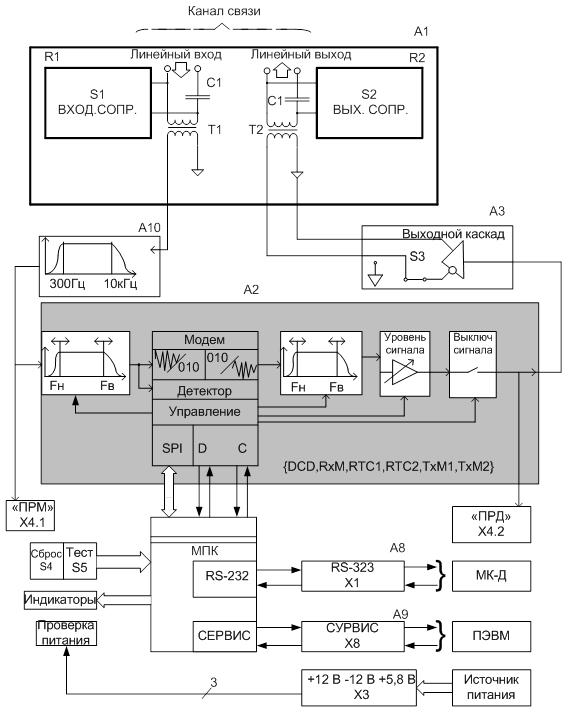
Рис. 20. Функциональная схема модема УКП
Линейный выходной каскад A3 предназначен для согласования с каналом связи и представляет собой преобразователь напряжение - ток, нагрузкой которого является выходной согласующий трансформатор Т2 линейных цепей А1.
Микропроцессор А4 предназначен для управления работой модема УКП и обеспечения взаимодействия между составляющими его устройствами. В частности, он обеспечивает преобразование форматов данных канала связи телемеханики ЛИСНА в формат АСТМУ-А и их дистанционное переключение и выполнение диагностической команды, приходящей по линии связи по 20-му каналу. Микропроцессор также согласовывает скорости обмена данными с модемом (не более 1200 бит/с) и интерфейсом А8 (9600 бит/с) в асинхронном режиме. Контроллер А4 проверяет наличие сигнала о достаточности уровня входного сигнала (сигнал DCD) в модеме А2 и отсутствие ошибок в структуре последовательных данных (сигнал RxM) от модема, осуществляет управление сигналом передатчика модема А2, анализирует состояния и работу схем модема-УКП и выводит соответствующую информацию на индикаторы.
Предварительный полосовой фильтр А10 осуществляет подавление сигналов низкочастотной (менее 250 Гц) и высокочастотной (более 10 кГц) помехи за пределами рабочей полосы частот.
Другое по теме:
Инженерные коммуникации Естественная насыщенность почвы водой, как правило, не совпадает с нужной для роста и развития растений влажностью и во многих случаях является серьезной помехой для строительной деятельности человека. Поэтому необходимо искусственно создавать и ...