Согласно высота огня над уровнем воды для буев составляет от 1 до 3 м, поэтому длина механического преобразователя воздействия (далее маятник) должна быть не больше этого диапазона (возьмём 80 см). Для конструкции маятника достаточно небольшого угла отклонения от положения равновесия (см. 2 главу). Пьезоэлектрический преобразователь (ПП) нужно расположить так, чтобы усилие маятника на него было максимальным, т. е. точка, в которой маятник воздействует на ПП, должна быть как можно ближе к точке подвеса (рисунок 3.1). Далее ПП будем обозначать одним пьезоэлементом (ПЭ).
Исходные данные:
- отклонение маятника, r: от 2 до 5 мм (шаг 0,2 мм);
- длина маятника, B: 80 см;
- длина плеча, b1: от 1 до 7 см (шаг 1 см);
- длина плеча, b2: B - b1;
- масса маятника, m: от 4 до 8 кг (шаг 1 кг);
- ускорение свободного падения, g: 10 м/с2.
Маятник будем считать математическим, совершающий гармонические колебания. Поскольку угол отклонения мал, то колебания маятника являются собственными (незатухающими). Сила, действующая на тело в любой точке траектории, направлена к положению равновесия, а в самой точке равновесия равна нулю. Необходимо найти силу F1, действующую на ПЭ
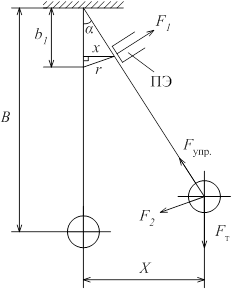
Рисунок 3.1 - Механический преобразователь воздействия (маятник)
Сила F2 направлена к положению равновесия и определяется выражением
![]()
где а - ускорение, изменяющееся по гармоническому закону.
Перемещение X определяется по формуле
![]()
где X0 - амплитуда колебания маятника;
ωМ - собственная частота колебаний маятника (ωМ = 2π/T, где ![]() - период колебаний маятника), B = b1 + b2;
- период колебаний маятника), B = b1 + b2;
t - время.
Таким образом, собственная частота равна

Ускорение а будет равно второй производной от X, следовательно
![]()
Подставляя (3.2) и (3.3) в (3.4), получим ускорение (по модулю)

Перемещение X можно определить также через синус угла отклонения
![]()
где α = 2∙arcsin(r/2b1). (3.7)
Подставим (3.6) в (3.5) и получим
![]()
Запишем условие равновесия маятника при отклонении его на некоторый угол
F1∙d1 = F2∙(b1+b2), т. е.

Подставим (3.8) в (3.1) и полученное выражение в формулу (3.9), следовательно

В таблице 3.1 приведены значения углов отклонения маятника в зависимости от длины плеча b1 согласно формуле (3.7).
Таблица 3.1
| Откло-нение маятника r, мм | Отклонение маятника α0 в зависимости от длины плеча b1 | ||||||
| 1,0 см | 2,0 см | 3,0 см | 4,0 см | 5,0 см | 6,0 см | 7,0 см | |
| 2,0 | 11,478 | 5,732 | 3,82 | 2,865 | 2,292 | 1,91 | 1,637 |
| 2,2 | 12,631 | 6,306 | 4,203 | 3,152 | 2,521 | 2,101 | 1,801 |
| 2,4 | 13,784 | 6,88 | 4,585 | 3,438 | 2,75 | 2,292 | 1,965 |
| 2,6 | 14,939 | 7,454 | 4,967 | 3,725 | 2,98 | 2,483 | 2,128 |
| 2,8 | 16,096 | 8,028 | 5,35 | 4,012 | 3,209 | 2,674 | 2,292 |
| 3,0 | 17,254 | 8,602 | 5,732 | 4,298 | 3,438 | 2,865 | 2,456 |
| 3,2 | 18,414 | 9,177 | 6,114 | 4,585 | 3,668 | 3,056 | 2,619 |
| 3,4 | 19,576 | 9,752 | 6,497 | 4,872 | 3,897 | 3,247 | 2,783 |
| Откло-нение маятника r, мм | Отклонение маятника α0 в зависимости от длины плеча b1 | ||||||
| 1,0 см | 2,0 см | 3,0 см | 4,0 см | 5,0 см | 6,0 см | 7,0 см | |
| 3,6 | 20,74 | 10,327 | 6,88 | 5,158 | 4,126 | 3,438 | 2,947 |
| 3,8 | 21,906 | 10,903 | 7,262 | 5,445 | 4,356 | 3,629 | 3,111 |
| 4,0 | 23,074 | 11,478 | 7,645 | 5,732 | 4,585 | 3,82 | 3,274 |
| 4,2 | 24,245 | 12,054 | 8,028 | 6,019 | 4,814 | 4,012 | 3,438 |
| 4,4 | 25,418 | 12,631 | 8,411 | 6,306 | 5,044 | 4,203 | 3,602 |
| 4,6 | 26,594 | 13,207 | 8,794 | 6,593 | 5,273 | 4,394 | 3,766 |
| 4,8 | 27,773 | 13,784 | 9,177 | 6,88 | 5,503 | 4,585 | 3,93 |
| 5,0 | 28,955 | 14,362 | 9,56 | 7,167 | 5,732 | 4,776 | 4,093 |
Другое по теме:
Диктофон В настоящее время до девяноста процентов всего потока информации воспринимается органами зрения человека. Поэтому важным направлением научной организации труда является увеличение части потока информации, воспринимаемой другими органами чувств и ...