На первичную информацию, выдаваемую ИК, могут накладываться локальные возмущения, искажающие характер этой информации. Причин этих локальных возмущений в основном две.
Первой причиной становятся случайные погрешности ИК, которые, как и для любых СИ, определяются только свойствами ИИС.
Второй причиной являются локальные неоднородности ИО, которые не зависят от свойств СИ и не учитываются в рамках используемых физических и математических моделей ИО. Наличие таких возмущений не является принципиально новым. Например, при измерении действующего значения напряжения сети переменного тока с помощью вольтметра на результате измерения сказываются шумы и помехи, накладывающиеся на это напряжение. Однако влияние этих шумов незначительно, поскольку они усредняются за счет инерционности вольтметра. В этом случае быстродействие ИК (в целом положительный фактор) приводит к отрицательным последствиям — фиксации в "мгновенных" отсчетах значений шумов.
Другой пример локальных воздействий, обусловленных свойствами ИО, — локальные флуктуации температуры воздуха за счет турбулентных потоков. К локальным неоднородностям относится шероховатость, имеющая масштабы порядка микрометров и долей микрометров, и волнистость поверхности, имеющая существенно большие масштабы.
Получая с ИК большое количество отсчетов, детально описывающих изменения исследуемой физической величины, можно построить оптимальные алгоритмы обработки этой информации, обеспечивающие наилучшее подавление этих локальных возмущений. Однако объем передаваемой и обрабатываемой информации при этом может оказаться нерационально большим. Для уменьшения этого объема производится сглаживание информации. В результате сглаживания ее объем уменьшается в несколько раз, а иногда и в десятки раз. Сразу отметим, что вводя предварительное сглаживание, мы отказываемся от оптимальной обработки исходной информации. Поэтому используемые субоптимальные алгоритмы обработки сглаженной информации дадут несколько худшие результаты. Это ухудшение обычно оказывается незначительным. Однако при выборе алгоритма сглаживания наличие этого ухудшения нужно иметь в виду и хотя бы ориентировочно оценивать его величину.
Наиболее часто производится сглаживание первичной информации во времени. В этом случае алгоритм обработки, называемый иногда оператором текущего среднего, очень прост:
 (5)
(5)
Это соотношение записано в дискретной форме. Однако с целью теоретического анализа удобнее записать его для непрерывного времени:
 (6)
(6)
Соотношение (6) является приближением к (5), поскольку на практике в большинстве случаев обработка ведется в дискретной форме, хотя иногда и используется сглаживание аналоговых сигналов с помощью интегрирующих RС-цепочек, интегрирующих операционных усилителей или других аналоговых фильтров. Алгоритмы (5) и (6) физически реализуемы и могут работать в реальном времени, поскольку для расчета усредненного значения используются значения (отсчеты) сигнала только в предшествующие моменты времени. Однако это приводит к задержке информативной составляющей на время T/2 или на М/2 отсчетов. От этого недостатка свободен алгоритм
который в силу своей физической нереализуемости может применяться только к накопленному массиву данных. Поэтому информация все равно будет получаться с запаздыванием, но будет привязана к правильному моменту времени.
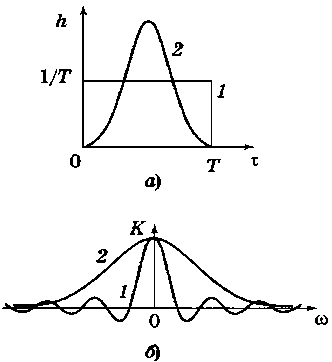
Алгоритм текущего среднего как в дискретном, так и в непрерывном виде очень прост. Однако он имеет некоторый недостаток. Весовая функция, соответствующая линейному оператору (6) , имеет вид 1, показанный на рис. 5, а, и записывается как
Взяв преобразование Фурье, получим комплексную частотную характеристику, соответствующую этой весовой функции.
 Перейти на страницу: 1 2
Перейти на страницу: 1 2
Другое по теме:
Обработка сигналов на основе MCS-51 В данном курсовом проекте рассматриваются практические примеры и их программная реализация на языке ассемблера для микроконтроллера семейства MCS-51 (МК51). При рассмотрении решения задач, связанных с генерацией временных интервалов и раб ...