По одному из путей пошёл Кевин Доулинг. Его работа в области змеевидных роботов Kevin J. Dowling Limbless Locomotion: Learning to Crawl with a Snake Robot является одной из самых известных в области создания змеевидных роботов. В этой работе проведен наиболее полный и комплексный анализ построения змеевидного робота. В результате работы был создан прототип змеевидного робота.
В прототипе использовались три микроконтроллера и 20 сервоприводов. При проведении исследовательской работ был выбран протокол RS-232, как наиболее простой в реализации и достаточный для отработки 20 сервоприводами всех требуемых положений. Каждый из микроконтроллеров, который использовался в прототипе был способен обеспечить работу 8 сервоприводов, за счет использования нескольких каналов. Для управления был выбран стандартный интерфейс с протоколом RS-232, на скорости 9600 бод. Для активации сервопривода использовалось 3х байтовый поток информации, что обеспечивало обновление информации на сервомоторе 16 раз в секунду. Принципиальная схема робота представлена на Рисунке 2.2.
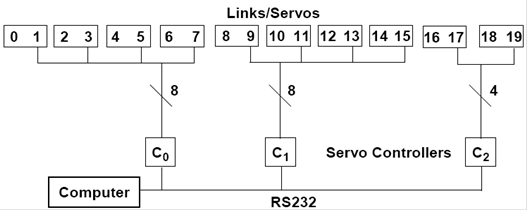
Рис. 2.2 Схема управления ЗР Доулинга
Принцип обмена данными т.е. управления прост: Когда с компьютера через последовательный интерфейс по протоколу RS-232 отсылается задание на контроллеры приводов, каждый из контроллеров (С0, С1, С2) определяет какому приводу оно предназначено (так как при формировании задания, а вернее посылки в него закладывается и номер привода которому оно предназначено) и выполняет его, в случае прихода задания на привод, которым контроллер не управляет, информация не обрабатывается.
Другое по теме:
Программирование микроконтроллеров Актуальность темы. Микроконтроллеры используются во всех сферах жизнедеятельности человека, устройствах, которые окружают его. Простота подключения и большие функциональные возможности. С помощью программирования микроконтроллера можно решить мн ...