В настоящее время всё большое распространение получают так называемые протоколы полевой шины (FieldBus, CAN и т.д.). В связи с этим я считаю необходимым дать краткий обзор реализации многозвенного робота с использованием этих протоколов. Примером послужит схема управления роботом «Коперник» предложенная Дору Михалачи.
На каждом звене его прототипа расположено по 3 сервопривода (Рисунок 2.3).
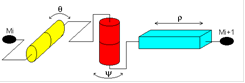

Рис. 2.3 Схема модуля ЗР Михалачи
Так же на каждом модуле расположен управляющий контроллер, который получает задание с компьютера и потом распределяет задание по приводам, естественно каждый привод работает на своем канале. Для связи контроллеров был использован CAN интерфейс.(Controller Area Network) представляет собой систему с последовательной распределенной передачей сообщений, т.е. посредством программного или аппаратного фильтра происходит идентификация сообщения узлом, установка приоритета и реакция на него. Передача информации по CAN fieldbus может проходить без участия устройств верхнего уровня (для сложных схем реализаций и взаимодействия). Согласно CAN-протоколу, если передачу CAN-сообщения начинает более чем один узел, после арбитража передачу продолжает только тот узел, который передает сообщение с наивысшим приоритетом.
В протокол встроен сложный алгоритм обнаружения ошибок. Его в общих чертах можно описать следующим образом: если передающий узел посылает или получает кадр ошибки, он автоматически начинает повторную передачу текущего сообщения. Еще одной особенностью этой технологии является зависимость скорости передачи от длины физического канала связи. Наиболее популярные протоколы этого типа: CANopen, Kingdom (Kvaser), DeviceNet (Allen Brandley), SDS (Honeywell), CAL (CAN Application Layer), SAEJ1939. Какой из них был реализован в данной модели автор не уточнял.
Причина выбора CAN была обусловлена наличием большого количества сервоприводов и датчиков обратных связей, наличием регуляторов, для работоспособности этой системы в реальном времени нужен был широкий канал связи, RS-232 не позволял этого из-за низкой пропускной способности ограниченной стандартами. Контроллеры на модулях использовались от фирмы SIEMENS - С167, с изначально заложенной поддержкой CAN.
Схема управления представляет собой, формирование массива данных, в котором заключалась информация для приводов, после чего он отправлялась по CAN интерфейсу на котроллеры, они же предавали сигнал на привода. (Рисунок 2.4).
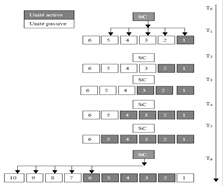
Рис. 2.4 Схема управления ЗР Михалачи
Другое по теме:
Проектирование и технология радиоэлектронных средств МикроЭлектроМеханические Системы или сокращенно МЭМС - это множество микроустройств самых разнообразных конструкций и назначения, производимых сходными методами с использованием модифицированных групповых технологических приемов микроэлектроники ...