В конце 2004 году в ЦНИИ РТК началась разработка прототипа змееподобного робота «ЗМЕЕЛОК». Группе студентов под руководством Телешева Н.С. было дано задние по созданию системы управления многозвенным исполнительным устройством с числом степеней подвижности необходимых к управлению 5 и более.
Одним из требований разработчиков робота была способность системы управления отрабатывать воздействие в виде бегущей волны. Выполнение такого технического задания рассматривается в данной работе.
Для реализации подобных многозвенных систем используют электромеханические и пневматические приводы, металлы и пластики с памятью формы.
Для нашего решения был выбран электромеханический подход. Который базируется на использование, с целью сокращения сроков разработки и минимизации затрат, стандартных сервоприводов реализованных в виде рулевых машинок которые используются в моделирование, а так же в системах локальной автоматики которые имеют структуру исполнительной системы.
Такая сервосистема отрабатывает позицию которая задаётся системой управления при помощи выдачи ШИМ сигнала. Данный вид управления называется позиционным.
В качестве исполнительных механизмов в каждом звене робота предполагалось использовать 2 сервопривода HS-81MG (Рисунок 6.1 Такие серводвигатели фирмы HiTec используются в качестве приводов в моделестроение. Они управляются за счёт подачи на вход ШИМ в диапазоне от 0.9 мс до 2.1 мс с частотой 50 Гц т.е. 20 мс (данные производителя).

Рис. 3.1 Общий вид сервопривода HS-81MG
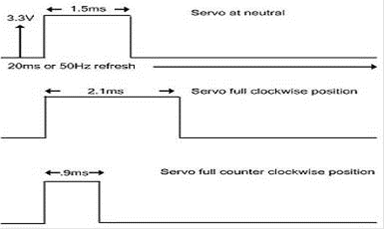
Рис. 3.2 Общий вид сервопривода HS-81MG
Характеристики рулевой машинки приведены в Таблице 3.1.
Таблица 3.1
| Момент - 4.8 / 6 В | 2.6 / 3.0 кг/см |
| Скорость - 4.8 / 6 В | 0.11 / 0.09 сек/60° |
| Размеры | 29.8x12x29.6mm |
| Потребляемый ток | 8.8mA/9.1mA |
| Вес | 16,6 г |
Управлять данным объектом возможно имея централизованную систему управления (Рисунок 3.2) в виде персонального компьютера или специализированного автономного аппаратно-програмного комплекса с соответствующими интерфейсами или распределенную систему (Рисунок 3.3). Сравним эти конкурирующие варианты в соответствии с требованиями предъявляемыми разработчиками.
Другое по теме:
Расчет сети IP-телефонии трафик, задержка, маршрутизатор Курсовой проект по дисциплине «IP-телефония и видеосвязь» выполняется студентами, обучающимися по специальности 5В071900 «Радиотехника, электроника и телекоммуникации». Дисциплина «IP-телефония и видеосвязь» изучается студентами на восьмом се ...