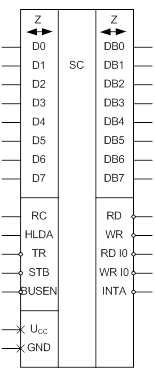
Рис 3.3 Системный контроллер и шинный формирователь КР580ВК28
Системный контроллер и шинный формирователь КР580ВК28 предназначен для фиксации слова-состояния МП, выработки системных управляющих сигналов, буферизации шины данных МП и управлением передачи данных. Системный контроллер формирует управляющие сигналы по сигналам состояния микропроцессора при обращении к ЗУ: RD и WR; при обращении к УВВ: RD IO и WR IO, а также обеспечивает прием и передачу 8-разрядной информации между каналом данных микропроцессора по выводам D7-D0 и системным каналом по выводам DB7-DB0. Регистр состояния по входному сигналу STB фиксирует информацию состояния микропроцессора в первом такте каждого машинного цикла. Дешифратор управляющих сигналов формирует один из управляющих сигналов в каждом машинном цикле: RD, WR, RD IO, WR IO, INTA. Асинхронный сигнал BUSEN управляет выдачей данных с буферной схемы и управляющих сигналов: при напряжении высокого уровня все выходы микросхемы переводятся в высокоомное состояние.
Назначение выводов микросхемы приведено в таблице 3.3.
Таблица 3.3. Назначение выводов микросхемы
| Вывод | Обозначение | Тип вывода | Функциональное назначение выводов |
| 1 | STB | Вход | Стробирующий сигнал состояния (от ГТИ) |
| 2 | HLDA | Вход | Подтверждение захвата |
| 3 | TR | Вход | Выдача информации |
| 4 | RC | Вход | Прием информации |
| 5,7 9,11, 13,16, 18,20, | DB4,DB7, DB3,DB2, DB0,DB1, | Вход/выход | Канал данных системы |
| 6,8,10, 12,15,17, 19,21 | D4,D7,D3, D2,D0,D1, D5,D6 | Входы/выходы данных со стороны МП | |
| 14 | GND | — | Общий |
| 22 | BUSEN | Вход | Управление передачей данных и выдачей сигналов |
| 23 | INTA | Выход | Подтверждение запроса прерывания |
| 24 | RD | Выход | Чтение из ЗУ |
| 25 | RD IO | Выход | Чтение из УВВ |
| 26 | WR | Выход | Запись в ЗУ |
| 27 | WR IO | Выход | Запись в УВВ |
| 28 | UCC | Вход | Напряжение питания +5В |
Другое по теме:
Гироскопическая курсовертикаль Состав 1. Гироскопический агрегат состоит из следующих основных узлов: 1) трех гироскопических узлов одинаковой конструкции; 2) корректирующего устройства; 3) трех датчиков дистанционной передачи; 4) разгрузочных электродвиг ...