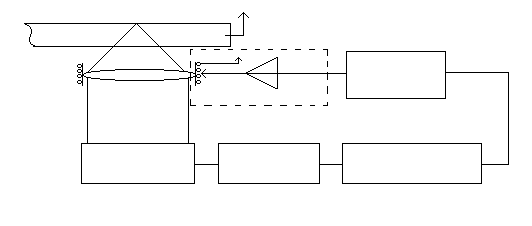
Рис.1. САРФ
Датчик положения обеспечивает сигнал в виде напряжения постоянного тока, приблизительно пропорциональный ошибке фокусировки. После усиления и коррекции этот сигнал преобразуется в ток, протекающий по катушке, находящейся в магнитном поле (местный электродвигатель), что вызывает появление вертикально направленной силы, приложенной к объективу. Он перемещается в направлении уменьшения ошибки. Из рисунка видно, что САРФ является системой с замкнутой петлей обратной связи.
Для работы такой системы требуется наличие биполярного сигнала ошибки фокусировки. Этот сигнал получают оптическими средствами. Большинство методов получения сигнала ошибки фокусировки основаны на том факте, что лазерный луч отражается диском точно в обратном направлении только в случае, когда фокус находится точно на поверхности диска. Если внести некоторую асимметрию в оптический путь отраженного луча, то появляется возможность выделять сигнал отклонения фокуса от поверхности диска. При этом диск не должен найти никакой информации специально для фокусировки. К наиболее широко используемым методам выделения сигнала ошибки фокусировки относится метод ножа Фуко, метод частичного перекрытия зрачка и астигматический метод.
Во всех методах при выделении и формировании сигналов ошибки высокочастотные составляющие сигнала с фотоприемника интереса не представляют. Сигнал с фотоприемника поступает на низкочастотный фильтр, который подавляет высокочастотные колебания, обусловленные питами или отверстиями. Можно сказать, что питы так быстро движутся перед объективом, что сливаются в единую дорожку усредненной промежуточной интенсивности.
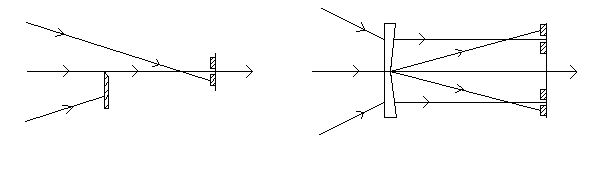
Рассмотрим работу датчика положения, использующего для получения сигнала ошибки метод частичного перекрытия зрачка. На рис.2 изображена схема метода.
D1
D2
D1
X Х
D2
H D3
D3
Рис.2. Метод частичного перекрытия зрачкас помощью непрозрачного экрана Н(а), и при замене его бипризмой (б).
В данном методе край непрозрачного экрана расположен вдали от точки фокуса отраженного пучка, а двух площадочный детектор в согласованном состоянии (фокус на дорожке диска) расположен точно в фокусе. В этой точке распределение света в пятне сложное, но с достаточной точностью можно считать, что оба детектора освещены равномерно. Однако уже на небольшом расстоянии X от фокуса становится допустимым геометрическое приближение и расфокусировка приводит к увеличению освещенности одной половины экрана относительно другой. Если в плоскости экрана расположить два детектора D1 и D2 (рис.2a), то сигнал ошибки фокусировки Uф будет равен:
Uф=UD1-UD2 ,
где: UD1, UD2 – сигналы, снимаемые с детекторов D1 и D2.
Сигнал ошибки фокусировки изменяется от максимального положительного до максимального отрицательного значения при перемещении фокуса. Это расстояние, измеренное на детекторе, соответствует двойному перемещению диска вследствии отражательного характера системы.
Для уменьшения чувствительности метода к расстройке элементов из-за температурных и механических деформаций вместо экрана обычно применяют бипризму и два двухплощадочных детектора вместо одного (рис.2б), что существенно сближает эту чувствительность. На рис.3. показан сигнал ошибки фокусировки, полученный по этому методу. Перейти на страницу: 1 2
Другое по теме:
Обработка сигналов на основе MCS-51 В данном курсовом проекте рассматриваются практические примеры и их программная реализация на языке ассемблера для микроконтроллера семейства MCS-51 (МК51). При рассмотрении решения задач, связанных с генерацией временных интервалов и раб ...