При проектировании систем, использующих такой метод определения ошибки расфокусировки необходима дополнительная проверка максимального отклонения от фокуса. Для проведенной характеристики должно выполнятся условие |XMAX| < 3мкм. Таким образом, при использовании метода определения ошибки фокусировки, датчик положения можно условно представить в виде схемы, приведенной на рис.6., состоящей из суммирующего усилителя с коэффициентом передачи КУ и фильтра низких частот.
| D1 D2 R UДП КУ D3 U∑ С D4
|
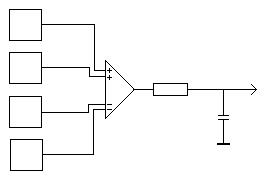
Рис.6. Схема датчика положения.
Уравнения, описывающие эту схему при неограниченной мощности усилителя и бесконечно большом входном сопротивлении следующего каскада, имеют вид:
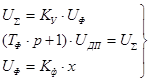
Где UФ - сигнал расфокусировки;
RУ - коэффициент передачи суммирующего усилителя;
UДП - сигнал на выходе датчика положения;
![]() - постоянная времени фильтра низких частот;
- постоянная времени фильтра низких частот;
![]() - оператор дифференцирования;
- оператор дифференцирования;
x – сигнал ошибки фокусировки;
kФ – крутизна характеристики сигнала расфокусировки.
На рис.7. показана структурная схема датчика положения.
Рис.7
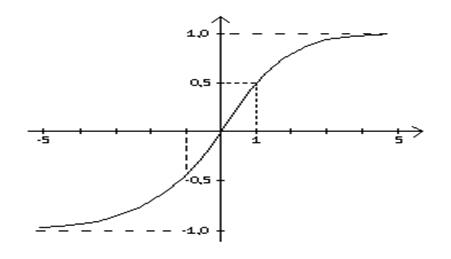
Значение kФ определяется путем линеаризации характеристики в точке начала координат, т.е.
 Uф
Uф
X max
UФ = 1;
x = 2 * 10 –6 (м)
kФ = UФ / x = 0,5 * 10 6
TФ - скорость потока данных, считываемых с дорожки диска может быть выбрана по выражению
![]() >(3
>(3![]() 5)
5)![]()
Где λ – максимальное расстояние между двумя переходами от пита к ленду в канальном ходе на дорожке диска ;
f – скорость считывания канального хода (потока данных) бит/с.
![]() =(3
=(3![]() 5)
5)![]() = p * 8 / 2*p* 14*150000 = 10 –6
= p * 8 / 2*p* 14*150000 = 10 –6
Значение передаточной функции датчика положения определяется по формуле
Wдп (S) = Ky * Kф / (Тф S + 1) = 3 * 2*10 6 / (10 – 6 * S + 1)
1.2.2 Определение параметров двигателя
Сигнал выхода усилителя мощности поступает на исполнительный двигатель, как правило линейный электродвигатель (ЛЭД), работающий по принципу громкоговорителя. Составными частями такого двигателя являются: катушка, постоянный магнит и, возможно, магнитопровод из магнитномягкого железа.
Пригодные к применению конструкции ЛЭД могут быть разделены на две основные группы с подвижной катушкой и с подвижным магнитом.
Альтернативным решением может быть конструкция с подвижным постоянным магнитом и неподвижной катушкой. В этом случае отвод тепла от катушки не является серьезной проблемой (низкое RT) и максимально допустимая температура катушки Ткат max может быть выше, так как она изолирована от объектива. Но развиваемая ЛЭД сила будет меньше из-за ослабления магнитного поля (низкое В), поскольку объем магнита меньше. Увеличение же магнита нежелательно, так как приводит к возрастанию массы подвижной части, что ухудшает динамические свойства САРФ.
Поэтому в реальных конструкциях применяется ЛЭД с подвижной катушкой.
Поскольку оба типа ЛЭД являются одинаковыми по принципу действия и различаются лишь подвижностью составляющих их частей, уравнения, описывающие их поведение можно представить в виде
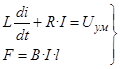
где: L – индуктивность катушки;
R=Rк+Rум - сопротивление катушки и внутреннее сопротивление усилителя мощности;
I - ток катушки;
В – магнитная индукция;
l – длина проводника катушки в магнитном поле;
F – сила действующая на катушку;
UУМ – напряжение на выходе усилителя мощности,
или в операторной форме
(Т·Р+1) F=LлэдUум
где ![]() - постоянная времени ЛЭД;
- постоянная времени ЛЭД;
![]() - коэффициент передачи ЛЭД;
- коэффициент передачи ЛЭД;
l = π dk W;
W – число витков катушки ЛЭД.
На рис.8. показана структурная схема двигателя.
 |
Другое по теме:
Проектирование блока буферной памяти В настоящее время, когда компьютерные системы развиваются быстрее всего во всем мире, не говоря уже о супер стремительном росте вычислительных скоростей, появляется проблема разработки внешних дополнительных устройств, для выполнения той или ино ...