Применение корректирующих устройств преследует две цели:
1. обеспечить требуемую точность системы;
2. получить приемлемый характер переходных процессов, т.е. качество регулирования.
Применение этих устройств направлено на введение в алгоритм управления производных и интегралов от ошибки и от внешних воздействий. При этом дифференцирование и интегрирование может осуществиться либо во всем частотном диапазоне работы системы, либо на некотором его интервале. Последовательные корректирующие устройства размещают в цепи основного воздействия, а параллельные – в цепях обратных связей.
Наиболее универсальным и эффективным методом повышения точности является увеличение общего коэффициента усиления. Это можно сделать за счет введения в систему дополнительных усилителей.
Однако при увеличении общего коэффициента усиления система приближается к границе устойчивости. При некотором предельном значении коэффициента усиления система может стать неустойчивой. Таким образом, корректирующие устройства должны не только увеличить коэффициент усиления системы, но и одновременно повысить запас ее устойчивости.
5.1 Синтез последовательного корректирующего устройства
Определяем получившийся коэффициент усиления разомкнутой системы как разность между ординатой ОЛАЧХ неизменяемой части и ординатой ОЖЛАЧХ при частоте ![]() .
.
![]() ;
;
![]() .
.
Введем последовательное корректирующее устройство дифференциально-интегрирующего типа.
Определяем получившуюся суммарную ошибку:
![]() ;
;
После окончания переходного процесса постоянная составляющая скорости изменения задающего процесса будет иметь постоянное значение, а обусловленная ею составляющая ошибки определяется только статикой системы. В статике передаточная функция системы равна ее коэффициенту усиления. Поэтому
 ;
;
Составляющая моментной ошибки:
![]() ;
;
Ток короткого замыкания в якорной цепи двигателя при номинальном напряжении:
![]() ;
;
Номинальная скорость двигателя:
![]() ;
;
![]() ;
;
![]() .
.
Сравним:
![]() ;
;
![]() .
.
Вводим последовательное корректирующее устройство с передаточной функцией:
![]() ;
;
При этом
![]() .
.
Минимальное значение коэффициента усиления, которое обеспечивает удовлетворение условия ![]() .
.
 .
.
Принимаем
![]() и
и ![]() ;
;
Тогда
![]() ;
;
![]() .
.
Корректируем ОЛАЧХ неизменяемой части системы при помощи последовательного корректирующего устройства. Затем сдвигаем полученную ОЛАЧХ вниз до пересечения ее с ОЖЛАЧХ при частоте ![]() . Находим частоту
. Находим частоту ![]() и соответствующую ей постоянную времени, при которой пересекаются ОЛАЧХ неизменяемой части и ОЖЛАЧХ следящей системы. Рис 5б на дополнительном чертеже
и соответствующую ей постоянную времени, при которой пересекаются ОЛАЧХ неизменяемой части и ОЖЛАЧХ следящей системы. Рис 5б на дополнительном чертеже
![]() ;
; ![]() .
.
По передаточной функции последовательного корректирующего устройства, пользуясь справочными данными, выбираем схему последовательного корректирующего устройства. Принципиальная схема последовательного корректирующего устройства имеет вид (см. рис.6.):
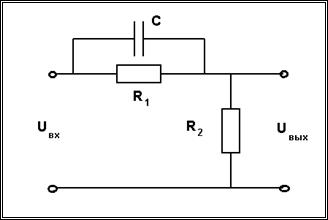
Рис.6.
Передаточная функция имеет вид:
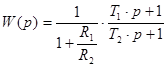 ; Перейти на страницу: 1 2
; Перейти на страницу: 1 2
Другое по теме:
Перспективы развития мобильных технологий в Украине Прошло не более 3 десятилетий с момента появления мобильных телефонов, но мобильная связь подверглась существенным изменениям. Системы первого поколения, основанные на аналоговом принципе, использовались исключительно для телефонной связи. ...