Управляемость (CY – controlability) может принимать относительное значение от 0 до 1.
CY = 1 – имеет первичный вход, где можно легко установить логические «0» и «1».
CY = 0 – имеет узел, который нельзя установить ни в одно из логических состояний.
Здесь узлы – эквипотенциальные линии, устройства - элементы схемы.
Практически значения управляемости большинства узлов лежат между двумя границами 0 £ CY £ 1. CY узлов в схеме уменьшается от первичных входов к первичным выходам.
В общем случае управляемость входов устройства не 100%, поэтому управляемость выходов должна учитывать как способность к передаче логических значений через устройство, так и значений управляемости на его входах.
CY (выходного узла) = KCY × f ( CY (входных узлов))
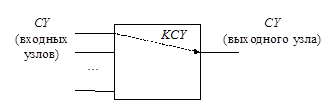
Рисунок 1.
KCY – коэффициент передачи управляемости устройства. Он является мерой, характеризующей степень различия способности генерировать значение «1» от способности генерировать значение «0». Он зависит только от логической функции, реализуемой устройством, и не зависит от места расположения устройства в схеме:
![]() ,
,
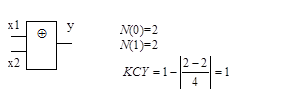
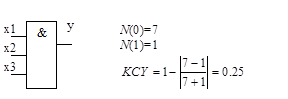
где N (0) – число всех способов установить логический «0» на выходе устройства;
N (1) – число всех способов установить логическую «1» на выходе устройства.
KCY = 1, если N (0) = N (1) (элементы НЕ, XOR).
В общем случае 0 < KCY £ 1.
N (0) и N (1) могут быть получены из таблиц истинности элементов. Для устройства с несколькими выходами каждый выход будет характеризоваться своим собственным значением KCY и в общем случае эти значения не будут одинаковыми.
f - среднее арифметическое CY(входов).
Управляемость начинает вычисляться с первичных входов. Она вычисляется для всех узлов, лежащих на пути от первичных входов до первичных выходов включительно.
Наличие обратных связей в устройстве усложняет вычисление CY в узлах всей схемы устройства. В этом случае проблема сводится к решению системы линейных уравнений.
Другое по теме:
Обработка сигналов на основе MCS-51 В данном курсовом проекте рассматриваются практические примеры и их программная реализация на языке ассемблера для микроконтроллера семейства MCS-51 (МК51). При рассмотрении решения задач, связанных с генерацией временных интервалов и раб ...