Наблюдаемость (OY - observability) может принимать относительные значения от 0 до 1.
OY=1 для первичного выхода.
OY=1 для узла в узле.
OY=0, если невозможно обеспечить такие условия, при которых изменение значения в узле приводило бы к изменению значения на первичном выходе.
Практически 0£OY£1. Наблюдаемость узлов в схеме уменьшается от первичных выходов к первичным входам.
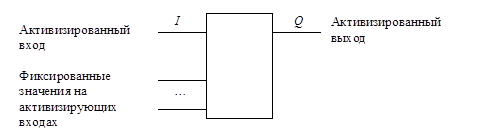
Рисунок 2
В общем случае процесс распространения информации о неисправности через устройство зависит, как от способности активизировать определенный вход, так и от способности установить фиксированные значения на некоторых или всех других входах устройства, позволяющих активизировать путь к определенному выходу устройства (функция управляемости этих входов). Следовательно:
OY(на выходе)=KOY*OY(на входе)*g(CY активизирующих входов),
где KOY - коэффициент передачи наблюдаемости. KOY(I-Q) - KOY от входа I к выходу Q.
KOY(I-Q)=1, если транспортировка значения неисправности существует всегда, независимо от состояний активизирующих входов.
KOY(I-Q)=0, если не существует пути транспортировки неисправности между I и Q.
Однако в действительности KOY лежит между этими пределами 0£KOY£1.
![]() ,
,
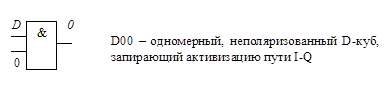
где N(PDC:I-Q) - число одномерных неполяризованных кубов (D-кубов), активизирующих путь I-Q
N(NPDC:I-Q) - число одномерных неполяризованных D-кубов, запирающих (блокирующих) активизацию пути I-Q.
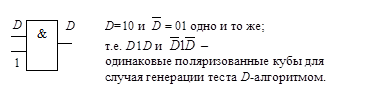
Для
"И": N(PDC:I-Q)=1,
N(NPDC:I-Q)=1,
KOY(I-Q)=1/(1+1)=0.5.
Для второго входа элемента "И" в виду симметрии KOY(I-Q)=0.5.
Для нахождения наблюдаемости по формуле (1) вычисление начинается с некоторого узла, где устанавливается OY=1 и это значение передается на первичные выходы схемы, чтобы на них получилось значение наблюдаемости исходного узла. Этот процесс затем необходимо повторять для каждого узла схемы.
Недостаток этого метода заключается в больших затратах времени, так как вычисления необходимо повторять столько раз, сколько узлов в схеме. При наличии обратных связей необходимо решать систему уравнений.
К счастью, можно использовать более простой способ, основанный на мультипликативных свойствах наблюдаемости.

Рисунок 3
OY(A-C)=OY(A-A)*OY(A-B)*OY(B-C),
так как OY(A-A)=OY(C-C)=1, то
OY(A-C)= OY(C-C)* OY(A-B)* OY(B-C).
Это определяет другой метод вычисления: начиная с первичных выходов схемы, значения наблюдаемости вычисляются для каждого узла на пути от выхода к входу.
OY(I-Q)= OY(C-Q)* KOY(I-C)*g(CY активизирующих входов).

Рисунок 4
g - среднее арифметическое CY активизирующих входов
Ветвление выхода
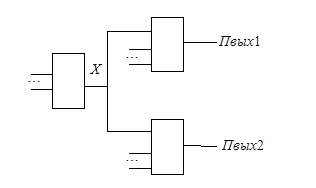
Рисунок 5
Наличие ветвления на выходе устройства позволяет наблюдать его состояние на некоторых первичных выходах схемы. (Пвых1 и Пвых2).
OY(составное)=1-П ,
OY(X-(Пвых1,Пвых2))=1-(*).
Сходящиеся ветвления

Рисунок 6
1) Для путей неравной длины стратегия следующая: выбирается кратчайший путь и для него подсчитывается OY узла X, т.е. OY(X-Пвых). Предполагается, что на практике для активизации выбирается кратчайший путь, а другие блокируются во избежание возможности схождения информации.
2) Для сходящихся путей равной длины стратегия заключается в вычислении OY(X-Пвых) для обоих путей и выборе пути с наибольшим значением наблюдаемости. И вновь предполагается, что все остальные пути, кроме одного выбранного, могут быть блокированы.
Другое по теме:
Элементы систем регулирования цифровых радиопередатчиков Радиопередающие устройства (РПдУ) применяются в сферах телекоммуникации, телевизионного и радиовещания, радиолокации, радионавигации. Стремительное развитие микроэлектроники, аналоговой и цифровой микросхемотехники, микропроцессорной и компьютер ...