Известно, что ДН ЗА приближенно можно определить путем интегрирования по поверхности раскрыва полей излучения его элементов Гюгенса. Интеграл можно взять строго лишь для ограниченного класса функций E(x), описывающих распределение поля в раскрыве.
Расчет ЗА будем вести в двух плоскостях: в горизонтальной и вертикальной.
Поскольку уровень боковых лепестков в горизонтальной плоскости не задан, то выберем его из соображений максимизации коэффициента усиления (КУ) проектируемой антенны. Максимуму КУ соответствует известная разница интенсивности облучения на краях зеркала и в его центре, для приближенного инженерного расчета эта величина составляет ![]() . В качестве функции распределения
. В качестве функции распределения ![]() в раскрыве выберем функции
в раскрыве выберем функции
![]() (1)
(1)
так как при использовании рупорного облучателя, реализовать распределение близкое к (1) проще, нежели к другим. Здесь ![]() - нормированная координата, где а - диаметр зеркала.
- нормированная координата, где а - диаметр зеркала.
График требуемых распределений поля в раскрыве для горизонтальной плоскости представлен на рисунке 5.
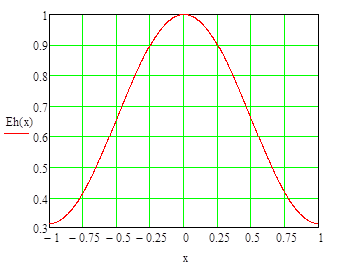
Рисунок 5- Функции распределения поля в горизонтальной плоскости
Теперь необходимо определить скачок поля в вертикальной плоскости.
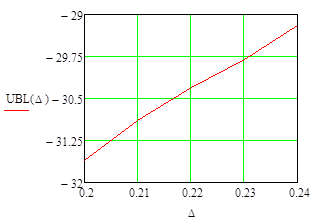
Рисунок 6- Зависимость УБЛ в вертикальной плоскости от скачка поля
На рисунке 6 представлена зависимость УБЛ в вертикальной плоскости от скачка поля по табличным данным , откуда определяем скачок поля в вертикальной плоскости![]() .
.
Так как значение УБЛ в горизонтальной плоскости нам не задано, найдём его по зависимости УБЛ от скачка поля
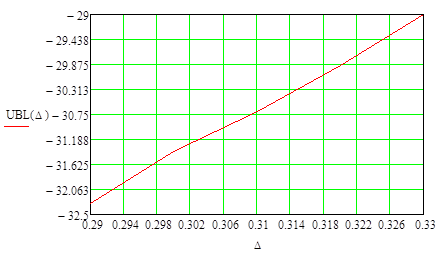
По данному графику находим, что УБЛ в горизонтальной плоскости равен -30 дБ.
Функция распределения поля в вертикальной плоскости выглядит следующим образом:
![]()
График распределения поля в вертикальной плоскости представлен на рис.7
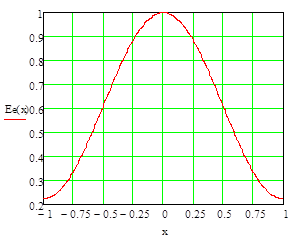
Рисунок 7 - Функция распределения поля в вертикальной плоскости
Другое по теме:
Разработка нижнего контура управления змееподобного робота В настоящее время всё чаще требуются мобильные роботы для работы в труднодоступных местах. Для этих целей создано множество роботов и ещё больше разрабатывается. Долгое время основным средством передвижения роботов являлись колесные ил ...