Преобразователь координат используется в гироскопическом агрегате автопилота в качестве фазовращателя, дающего два напряжения, фаза которых соответствует углу поворота ротора и имеет взаимный сдвиг 90°. В гироскопическом агрегате преобразователь координат преобразует величину напряжений, соответствующие системе координат ориентированной относительно Земли в величины напряжений, соответствуют системе координат, жестко связанной с самолетом (отсюда и название).
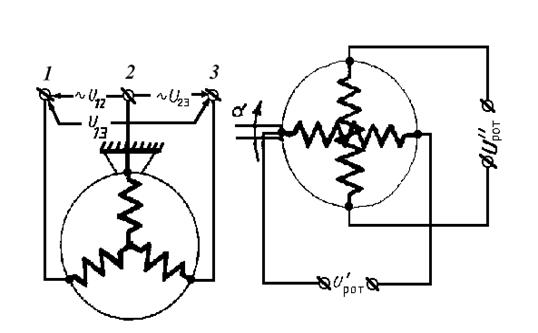
Преобразователь координат представляет собой индукционный фазорегулятор, выполненный по типу асинхронной машины с трехфазной обмоткой на статоре и двумя раздельными обмотками на роторе, оси которых сдвинуты между собой на 90°.
При питании, обмотки статора трехфазным напряжением в индукционной системе преобразователя координат возникает круговое вращающееся поле, которое не зависит от положения ротора (при симметричной нагрузке вторичных обмоток), что в свою очередь обуславливает соответствие фаз напряжений на обмотках ротора углу поворота ротора. Практически напряжение на обмотках ротора несколько колеблется при повороте, что обусловлено инструментальными погрешностями.
Напряжения на обмотках ротора могут быть выражены следующим образом:
U'рот= kU1sin(wt + a)
U''рот= kU2cos(wt + a)
где а - угол поворота ротора относительно начального положения соответствующего нулевому фазовому сдвигу относительно оси одной из обмоток ротора.
Съем сигналов, пропорциональных угловому отклонению самолета и дистанционная передача их приемникам для дальнейшей отработки и съема производится с помощью системы сельсиновой дистанционной передачи, состоящей из плоских сельсинов. Датчики ДП1, ДП2 и ДП3 этой системы установлены на каждой из осей карданного подвеса, в результате чего имеется возможность получать сигналы, пропорциональные отклонению самолета по крену, курсу и тангажу.
Другое по теме:
Исследование методов резервирования систем Для заданных расчетно-логических схем систем: 1. Получить методами интегральных, дифференциальных уравнений и методом графов (не менее чем двумя методами) для указанных в задании типов систем общие соотношения и расчетные формулы для к ...