Принципиальная схема проектируемой следящей системы.
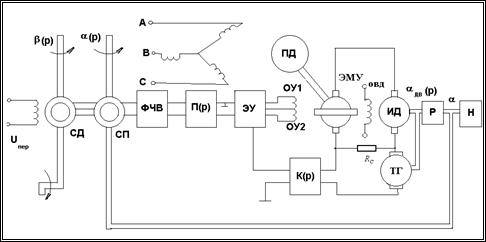
1.1 Основные элементы принципиальной схемы следящей системы
ФЧВ – фазочувствительный выпрямитель осуществляет выпрямление сигнала переменного тока в сигнал постоянного тока с учетом знака.
П(р) – последовательное корректирующее устройство обеспечивает введение в закон управления сигнала пропорциональной производной и интеграла от ошибки.
СД – сельсин-датчик используется в качестве задающего устройства (во многих системах используется вращающий трансформатор).
СП – сельсин-приемник электрически связан с СД, а механически с валом нагрузки.
Сельсинная пара СД-СП работает в трансформаторном режиме, сравнивает углы (вычитает их), преобразует угол поворота в напряжение на выходе. При этом сельсинная пара выполняет роль трех элементов:
· Задающего элемента (СД);
· Измерительного элемента (СП);
· Элемента сравнения.
ЭУ – электронный усилитель имеет несколько входов, что позволяет использовать для организации местных обратных связей.
ИД – исполнительный двигатель – ДПТ (двигатель постоянного тока).
Р – редуктор.
Н – нагрузка.
К(р) – параллельное корректирующее устройство
ОУ1, ОУ2 – обмотки управления ЭУ.
ЭМУ – электронно-машинный усилитель.
ПД – приводной двигатель ЭМУ.
RC – сериесное сопротивление вводится для формирования сигнала обратной связи по току.
ОВД – обмотка возбуждения двигателя.
ТГ – тахогенератор, напряжение на выходе которого пропорционально частоте вращения вала двигателя. Тахогенератор осуществляет обратную связь системы по скорости.
1.2 Структурная схема проектируемой следящей системы
Структурная схема проектируемой следящей системы представлена на рис.2.
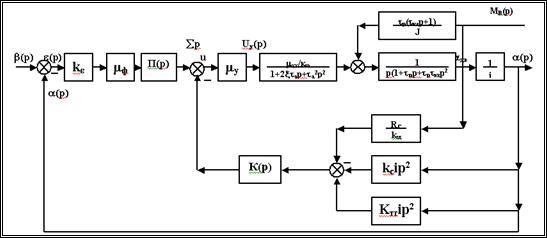
Рис.2.
Основные элементы структурной схемы следящей системы:
кe - коэффициент, характеризующий крутизну характеристики сельсинной пары.
mф – коэффициент передачи ФЧВ.
П(р) – последовательное корректирующее устройство.
åр – выходной сигнал второго сумматора.
Uу(р) – выходной сигнал ЭУ.
mу – коэффициент усиления ЭУ.
mхх – коэффициент холостого хода ЭМУ.
Кw - коэффициент противо-ЭДС.
tа – постоянная времени.
xа – коэффициент демпфирования.
tкз – постоянная времени короткого замыкания.
J – момент инерции двигателя.
i – передаточное число двигателя.
км – коэффициент пропорциональности между моментом и током двигателя.
МВ – возмущающий момент.
Ктг – коэффициент передачи тахогенератора.
1.3 Математическое описание системы
1. Уравнение тахогенератора.
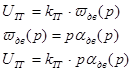 (1)
(1)
2. Напряжение на сериесном сопротивлении RC:
![]() ;
;
Запишем уравнение исполнительного двигателя:
![]() ;
;
![]() ;
;
![]() ;
;
МЭМ, МВ – электромагнитный и возмущающий моменты.
![]() ;
;
![]() ;
;
Выразим ток ![]() :
:
![]() ;
;
![]() ; (2)
; (2)
Введем обозначение:
![]() ;
;
![]() .
.
3. Уравнение первого сумматора:
![]() . (3)
. (3)
4. Уравнение электронного усилителя:
![]() . (4)
. (4)
5. Уравнение редуктора.
![]() ;
;
![]() . (5)
. (5)
6. Уравнение силовой части ЭМУ-Д.
 ;
;
 ; Перейти на страницу: 1 2
; Перейти на страницу: 1 2