Доступной наблюдению считается лишь вторая компонента вектора состояния системы. Требуется построить наблюдатель пониженного порядка для восстановления первой компоненты при подаче на вход единичного входного воздействия.
Рассмотрим решение данной задачи с использованием MatLab.
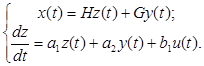
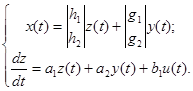
Представим передаточную функцию следующим образом:
![]()
Зададим систему в пространстве состояний и сформируем матрицы системы:
sys=ss(tf(, ));
=ssdata(sys)
В результате этого получим:
![]()
![]()
![]()
![]()
Определение порядка объекта и индекса наблюдаемости.
Порядок объекта n равен размерности матрицы А, а индекс наблюдаемости
p – рангу матрицы С. Тогда получаем:
![]()
Уравнения наблюдателя пониженного порядка имеет вид:
Где H и G - матрицы размерности ![]() и
и ![]() соответственно.
соответственно.
Уравнения описания искомого наблюдателя для заданных значений ![]() и
и ![]() примут вид:
примут вид:
Найдем параметры ![]() . Из условия наблюдателя пониженного порядка:
. Из условия наблюдателя пониженного порядка:
![]()
В нашем случае это будет выглядеть следующим образом:
![]() .
.
С учетом численных значений будут иметь вид:
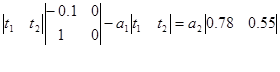
Из условия физической реализуемости полагают ![]() таким, чтобы обеспечить желаемое время переходного процесса в наблюдателе. Выберем
таким, чтобы обеспечить желаемое время переходного процесса в наблюдателе. Выберем ![]() , значение параметра
, значение параметра ![]() положим произвольным:
положим произвольным: ![]() . С учетом этих значений найдем с помощью пакета MATLAB коэффициенты
. С учетом этих значений найдем с помощью пакета MATLAB коэффициенты
матрицы Т.
a1=-10;
a2=1;
T=a2*C/(A-a1*eye(2))
Получим:
![]()
Далее определим параметр ![]() из условия
из условия ![]() следует:
следует:
![]() .
.
Используя пакет MATLAB, получаем:
b1=T*B
b1 =
0.0730
Затем найдем матрицы H и G:



Решим методом Крамера:
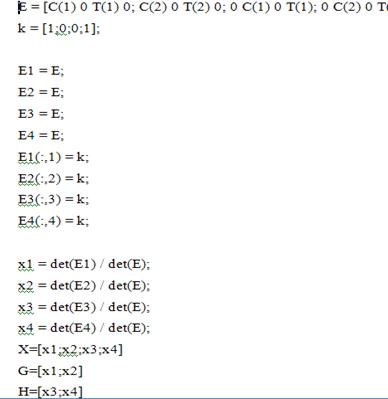
После решения мы получим:
![]()
![]()
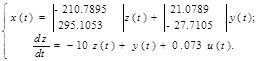
В соответствии с проведенными вычислениями уравнения наблюдателя принимают вид:
Другое по теме:
Проектирование цифровой радиорелейной линии Одним из основных видов современной связи являются радиорелейные линии (РРЛ) прямой видимости, которые используются для передачи сигналов многоканальных телефонных сообщений, радиовещания и телевидения, телеграфных и фототелеграфных сигналов, пе ...