Гироскопы ADXRS работают при ускорениях до 2000 g и могут использоваться, например, как автомобильные датчики переворота. Кроме того, их можно применять в интегрированных с GPS системах навигации, в системах стабилизации различных подвижных объектов и во многих других случаях
Одна из первых микроструктур LR-типа, разработанная в Draper Laboratory , показана на рисунке 1.4.
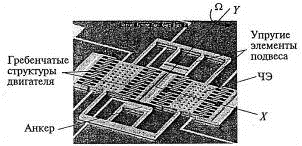
Рисунок 1.4 - Микроструктура LR-гироскопа Draper Laboratory
Здесь ЧЭ состоит из двух инерционных масс, связанных через упругие элементы подвеса и рамки с анкерами, скрепленными с подложкой, на которой расположены также статоры гребенчатых структур электростатических двигателей (левого, правого и центрального) и неподвижные электроды емкостных датчиков перемещений, тогда как подвижные электроды размешены на ЧЭ. Режим противофазного движения инерционных масс осуществляется в направлении оси X. При появлении угловой скорости Ω вокруг оси Y (ось чувствительности) инерционные массы под действием сил Кориолиса выходят из плоскости XY в противофазе, вызывая угловые колебания рамки вместе с инерционными массами, которые измеряются емкостными датчиками перемещений
Дрейф первых образцов прибора 0,5 .1 град/с в дальнейшем был уменьшен на порядок. Фирма Boeing освоила выпуск гироскопов и успешно применила их в автомобильной промышленности. Подобные гироскопы были использованы в разработанной Draper Laboratory системе управления и наведения реактивных снарядов ВМФ США Дрейф гироскопов, входящих в систему, составлял 1000 град/ч.
Конструктивная схема RR-гироскопа (базовая в "Draper Laboratory" на ранних стадиях разработки) приведена на рисунке 1.5. Она образована соединением двух рамок, выполненных в виде внешнего 1 и внутреннего 2 плоских элементов, соединенных между собой и с основанием 6 при помощи торсионов 3 и 4, оси которых взаимно перпендикулярны. Для увеличения инерционности на внутреннем элементе расположена дополнительная масса 5. С помощью электростатических датчиков силы наружному элементу / сообщаются первичные угловые колебания относительно оси Y. Эти колебания через торсионы 3 передаются и на внутренний элемент, сообщая ему колебательный кинетический момент. При вращении прибора со скоростью Ω относительно оси Z возникают силы Кориолиса, заставляющие колебаться внутренний элемент относительно оси X (РЧ), амплитуда которых, измеряемая расположенным под внутренним элементом емкостным преобразователем, пропорциональна измеряемой угловой скорости. Первоначально чувствительность прибора составляла 300 град/ч

Рисунок. 1.5 - Схема двухрамочного RR-гироскопа
В Draper Laboratory разработана также конструкция гироскопа с ЧЭ в форме кольца диаметром около 1 мм. Сформированная в кремниевой пластине структура такого гироскопа приведена на рисунке 1.6. Кольцо (ротор) 2 с помощью петлевых упругих элементов 4 закрепляется на центральной втулке 1, связанной с подложкой через упругие элементы 3. Для возбуждения колебаний здесь также используются электростатические датчики силы, а для съема показаний - емкостной преобразователь. Перейти на страницу: 1 2 3 4 5