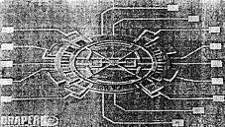
Рисунок 1.6 - Микроструктура RR-гироскопа Draper Laboratory
Выходное (наклонное) движение кольца воспринимается расположенными под ним пластинами конденсаторного датчика перемещений, выполненными в виде тонкопленочной металлизации на подложке из стекла "Pyrex". Имеется также электрод для компенсации выходного движения при работе гироскопа с обратной связью, компенсирующей момент сил Кориолиса.
На рисунке 1.6 видна гребенчатая структура приводного механизма. К стеклянной подложке прикреплены статорные гребенки, на кольце располагаются роторные гребенки. Имеются также дополнительные изолированные электрические гребенчатые структуры конденсаторных датчиков для измерения амплитуды колебаний кольца, которые могут использоваться в контуре управления с обратной связью. Кольцо крепится к центральной втулке четырьмя элементами, втулка поддерживается двумя элементами, прикрепленными посредством двух стоек к подложке
Также в приборы RR-типа выпускаются фирмами Bosch GmbH и института HSG-IMIT (Германия) В России разработкой гироскопов RR-типа занимается ЦНИИ “Электроприбор”, схема этого датчика, схожая с кольцевым гироскопом фирмы Draper Laboratory, и его микроструктура представлены на рисунке 1.7
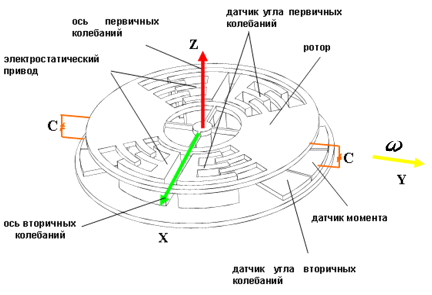
Рисунок 1.7 - Конструктивная схема и микроструктура RR-гироскопа ЦНИИ “Электроприбор”
На основе обзора и анализа научно-технической литературы, освещающей современный уровень разработки микромеханических акселерометров, установлено, что ММГ с поступательными входными и выходными и колебаниями ЧЭ (то есть ММГ LL-типа) имеют более высокую разрешающую способность по сравнению с ММГ, которые используют в своих ЧЭ угловые колебания (то есть ММГ LR-типа и RR-типа).
Общий недостаток двухмассовых гироскопов с независимым упругим подвесом каждой инерционной массы - сложность обеспечения равенства их собственных частот и синхронности противофазных колебаний и другие. Однако существенным преимуществом является возможность реализации дифференциальной схемы измерения.
Обзор и анализ научно-технической литературы показывают, что, в основном, разработчики микромеханических датчиков используют электростатические компенсирующие преобразователи и ёмкостные датчики перемещения. Реализация в микромеханическом приборе электростатического принципа преобразования приводит к низким силовым характеристикам, что приводит к малым перемещениям ЧЭ. Таким образом, необходима регистрация крайне малых ёмкостей (на уровне фемтофарад). В этом случае переходные ёмкости в схеме больше или сопоставимы с измеряемой величиной изменения ёмкости ДП. Кроме того, масса ЧЭ в рассмотренных разработках относительно мала. Указанные выше факторы приводят к уменьшению чувствительности, существенному сужению диапазона измерений и увеличению погрешности датчиков.
На пути совершенствования ММГ стоит много проблем, требующих решения на новом уровне развития мехатроники. Они, прежде всего, связаны с поиском новых технологических приемов формирования микромеханических структур с необходимыми характеристиками размеров, разработкой системы съема показаний, устойчиво работающей при микроперемещениях ЧЭ, и обеспечением требуемых характеристик чувствительности в низкочастотной области рабочих частот. От того, насколько удастся продвинуться в решении этих проблем ученым, инженерам, технологам, будет очевидно зависеть и будущее ММГ. Перейти на страницу: 1 2 3 4 5
Другое по теме:
Разработка локальной вычислительной сети (ЛВС) коммерческой организации Причиной создания локальной сети на данной коммерческой организации является: - Совместная обработка информации; - Совместное использование файлов; - Контроль за доступам к важным документам; Актуальность выполнения данной работы заклю ...