Система называется автоколебательной, если в ней происходит преобразование энергии постоянного источника в энергию колебаний при отсутствии внешнего периодического воздействия. Вид и свойства этих колебаний (частота, амплитуда, форма) определяются самой системой и не зависят от начальных условий. Таким образом, необходимыми элементами такой системы являются: колебательный узел системы; источник постоянной энергии, восполняющий неизбежные в реальной системе потери; элемент, управляющий поступлением энергии в колебательный узел; цепь обратной связи между колебательным узлом и ключом. Именно эта обратная связь, определяющая количество энергии, поступающей на колебательное звено от источника, и отличает автоколебания от вынужденных колебаний.
В повседневной жизни можно встретить множество примеров автоколебательных систем: биение сердца; голос человека и животного; незатухающие колебания маятника часов; игра духовых и смычковых музыкальных инструментов, формирование лазерного луча. Процессы энергетического обмена в природе происходят оптимальным образом. Как и во многих других отраслях, здесь наука могла бы многое почерпать, перенимая опыт естественных процессов. Однако пока чаще в технических системах внимание обращается на вредные случайные автоколебания, отрицательно сказывающиеся на свойствах объектов или даже разрушительные. Необходимо попытаться найти способы извлечения пользы из автоколебательных режимов. В приборостроении таким системам пока не было уделено должного внимания. Использование автоколебательных систем при создании инерциальных датчиков может принести существенные преимущества.
При создании датчиков, работающих в режиме автоколебаний, колебательной системой становится подвижный узел (ПУ) прибора, а обратная связь приобретает силовой характер. Реализация автоколебаний накладывает особые условия на выбор компенсирующего преобразователя (КП). ЧЭ обеспечивает взаимодействие датчика с измеряемой физической величиной и формирует входное воздействие, прикладываемое к подвижному узлу. Силовая обратная связь формирует компенсирующее воздействие, которое из-за наличия релейного элемента, формируемого на основе ДП и усилителя-преобразователя (УП), имеет импульсную форму. Автоколебания подвижного узла поддерживаются поступлением энергии от некоторого источника, которое регулируется движением самой системы. При этом силы, создаваемые КП, будут иметь знакопеременный характер, вызывающий колебания подвижного узла. Обобщённая структурная схема автоколебательного датчика представлена на рисунке 2.2.
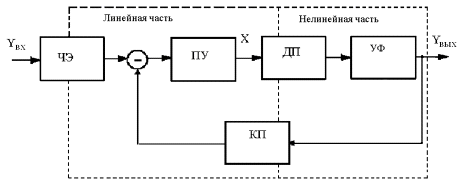
Рисунок 2.2 - Обобщённая структурная схема автоколебательного датчика
В данном случае появляется возможность регистрировать для получения информации время, так как глубина модуляции выходного сигнала пропорциональна входному воздействию. Как уже было сказано, временная модуляция превосходит по информационным параметрам амплитудную, а значит, обеспечивает большую точность измерения.
Кроме того, автоколебательные системы имеют значительно более высокие характеристики преобразования энергии, позволяющие при существенно меньшем потреблении энергии получить большее количество информации.
.3 Структурная схема микромеханического гироскопа
Структурная схема ММГ, работающего в режиме автоколебаний, представлена на рисунке 2.3.
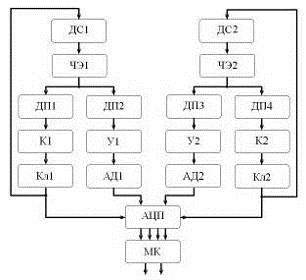
Рисунок 2.3 - Структурная схема автоколебательного микромеханического гироскопа
Первоначально оба чувствительных элемента ММГ (ЧЭ1 и ЧЭ2) приводятся в противофазные колебания по оси возбуждения. Датчик положения ДП1 определяет положение ЧЭ1 относительно оси возбуждения. Сигнал с ДП1 поступает на компаратор К1, выходное напряжение которого управляет ключом Кл1. Датчик силы ДС1 приводит ЧЭ1 в колебания в соответствии с сигналом, поступающим на ДС1 от Кл1. Аналогичным образом сигнал противоположной фазы поступает на ДС2, что приводит ЧЭ2 в противофазные с ЧЭ1 колебания.
При наличии угловой скорости по оси чувствительности ММГ ЧЭ1 и ЧЭ2 будут колебаться в противофазе относительно выходной оси вследствие действия силы Кориолиса. Датчики положения ДП2 и ДП3 Датчик положения ДП1 определяют положение соответственно ЧЭ1 и ЧЭ2 относительно осей возбуждения. Сигналы на выходе ДП2 и ДП3 усиливаются усилителями У1 и У2 и поступают на амплитудные детекторы АД1 и АД2 соответственно, а затем через аналого-цифровой преобразователь АЦП на микроконтроллер МК. Сигнал на выходе МК несёт информацию об измеряемой ММГ угловой скорости. Как было установлено на основе обзора и анализа разработок ММГ, использование двух ЧЭ позволяет, реализуя дифференциальную схему измерения, нивелировать многие погрешности ММГ. Перейти на страницу: 1 2
Другое по теме:
Активный полосовой фильтр В курсовой работе предложено изучить, рассчитать, построить и проанализировать работу активного полосового фильтра со следующими характеристиками: порядок фильтра – 4; граничные частоты – 100Гц, 18кГц; коэффициент передачи по напряжению ...