Пригодные к применению конструкции ЛЭД могут быть разделены на две основные группы с подвижной катушкой и с подвижным магнитом.
Конструкция с подвижной катушкой (рис.5) имеет ряд преимуществ и недостатков. Помимо проблем обрыва проводников, подводящих ток к катушке, движущая часть имеет обычно плохой тепловой контакт с окружающей средой (высокое тепловое сопротивление RT). Тепло, выделяющееся в подвижной катушке, приводит к росту температуры всей подвижной части, в частности объектива, что нежелательно. Это в конечном счете приводит к уменьшению среднего значения силы, развиваемой данным ЛЭД.
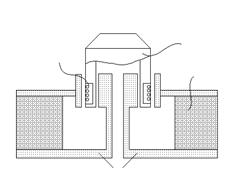
Рис.5. Привод головки с подвижной катушкой.
Достоинством системы с подвижной катушкой является то, что стационарная магнитная система может быть увеличена и, следовательно, с ее помощью можно обеспечить более сильное магнитное поле (высокое значение магнитной индукции В).
Альтернативным решением может быть конструкция с подвижным постоянным магнитом и неподвижной катушкой. В этом случае отвод тепла от катушки не является серьезной проблемой (низкое RT) и максимально допустимая температура катушки Ткат max может быть выше, так как она изолирована от объектива. Но развиваемая ЛЭД сила будет меньше из-за ослабления магнитного поля (низкое В), поскольку объем магнита меньше. Увеличение же магнита нежелательно, так как приводит к возрастанию массы подвижной части, что ухудшает динамические свойства САРФ.
Поэтому в реальных конструкциях применяется ЛЭД с подвижной катушкой.
Поскольку оба типа ЛЭД являются одинаковыми по принципу действия и различаются лишь подвижностью составляющих их частей, уравнения, описывающие их поведение можно представить в виде:
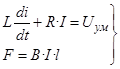 ,
,
где: L – индуктивность катушки;
R=Rк+Rум - сопротивление катушки и внутреннее сопротивление усилителя мощности;
I - ток катушки;
В – магнитная индукция;
l – Длина проводника катушки в магнитном поле;
F – Сила действующая на катушку;
UУМ – напряжение на выходе усилителя мощности, или в операторной форме:
(Т·Р+1) F=LлэдUум; (2)
где ![]() - постоянная времени ЛЭД;
- постоянная времени ЛЭД;
![]() - коэффициент передачи ЛЭД;
- коэффициент передачи ЛЭД;
l = р dk W;
W – Число витков катушки ЛЭД.
Определим передаточную Функцию ЛЭД:
WЛЭД = LЛЭД/(TP + 1);
Подставим значения:
WЛЭД = 4,71/(5*10-4P + 1).
В общем случае движение подвижной части зависит от воздействий, обусловленных наличием упругих элементов, рассеянием энергии в катушке при ее движении в магнитном поле, особенностей подвески подвижной системы.
Основная цель, стоящая при разработке подвески, обеспечить движение головки только по жестко заданным направлениям. Подвески могут быть с помощью линейных подшипников механического или электромагнитного типа и пружинных гибких направляющих. В первом случае перемещение в направлении регулирования ничем не ограничивается, а в перпендикулярных направлениях предотвращается путем выбора соответствующих подшипников с минимально возможными допусками у механических и максимальной жесткостью у электромагнитных. Тогда с учетом демпфирования в подвесе и диссинации энергии в катушке, уравнения движения подвижной части имеют вид:
![]() ,
,
где ![]() - коэффициент вязкого трения,
- коэффициент вязкого трения,
или в операторной форме
![]() ,
,
где ![]()
![]() .
.
k = 1/0.03 = 33;
T1 = 0.33;
Определим передаточную функцию подвижной головки:
Wп = k/P(T1P +1);
Подставим значения:
Wп = 33/P(0.33P + 1).
1.
Структурная схема САР
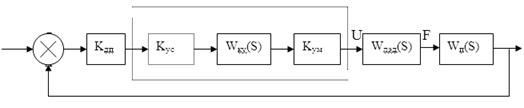
В силу малого значения Tф передаточная функция датчика положения принимает вид:
W1(P) = kдп
Определим передаточную функцию разомкнутой системы:
W(P) = Wдп (P) * WЛЭД(P) * Wп(P)
W(P) = 1784,3 /(S(5*10-4P+1)(0.33P+1))
K1 = 1784,3; 20LogK1=65 дб
T1 = 0.33
T2 = 5*10-4 Перейти на страницу: 1 2
Другое по теме:
Разработка систем передачи информации нового поколения В развитых странах волоконно-оптическая связь заняла лидирующее положение среди других средств связи. Ее отличительной чертой является значительно более высокая скорость передачи информации и более высокая надежность по сравнению с проводной эл ...