Автором работы была предложена следующая электро-кинематическая схема инерционной массы (ИМ) ММГ, работающего в режиме автоколебаний, представленная на рисунке 3.8. Датчик выполняется по кремниевой технологии с применением электромагнитных и оптоэлектронных элементов и представляет собой ММГ LL-типа.
ИМ - это пластина из монокристаллического кремния с прямоугольными оптическими щелями, закрепленная на упругих элементах подвеса с возможностью линейного перемещения по двум взаимно перпендикулярным продольной и поперечной осям OX и OY. Кинематическая схема одной ИМ ММГ, работающего в режиме автоколебаний, представленная на рисунке 3.9.
На рисунке 16 введены следующие обозначения: 1. первая оптическая щель, 2. первый излучатель, 3. первые упругие элементы подвеса, 4. постоянные магниты, 5. крышка, 6. второй излучатель, 7. четвёртый излучатель, 8. вторые упругие элементы подвеса, 9. четвёртая токопроводящая шина, 10. несущая рама, 11. четвёртый токоподвод, 12. вторые токопроводящие дорожки, 13. вторая инерционная масса, 14. вторая токопроводящая шина, 15. третий токоподвод, 16. второй фотоприёмник, 17. второй усилитель, 18. второй амплитудный детектор, 19. второй ключ, 20. микроконтроллер, 21. АЦП, 22. стабилизированный источник постоянного тока, 23. второй компаратор, 24. второй двухсегментный фотоприёмник, 25. вторая оптическая щель, 26. первый двухсегментный фотоприёмник, 27. первый компаратор, 28. первый ключ, 29. первый амплитудный детектор, 30. первый усилитель, 31. основание, 32. первый фотоприёмник, 33. первый токоподвод, 34. первая токопроводящая шина, 35. первая инерционная масса, 36. первые токопроводящие дорожки, 37. третий излучатель, 38. второй токоподвод, 39. третья токопроводящая шина.
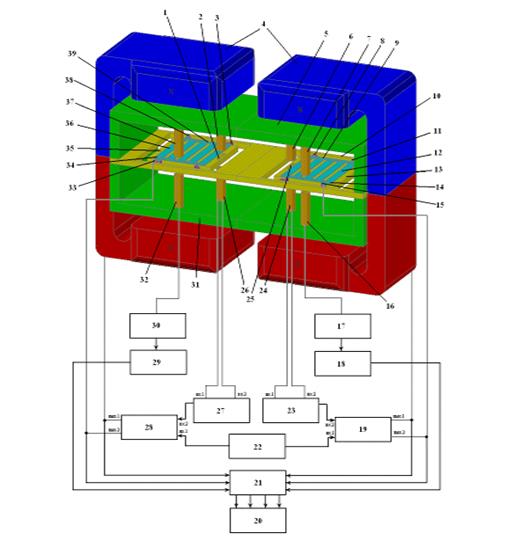
Рисунок 3.8 - Кинематическая схема автоколебательного ММГ
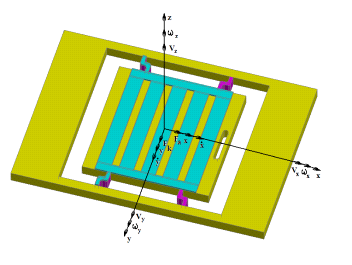
Рисунок 3.9 - Кинематическая схема одной ИМ ММГ
В представленном на рисунке 3.8 ММГ первая и вторая инерционные массы 35, 13 размещены на упругих элементах подвеса 3, 8 в несущей раме 10 в зазоре между двумя постоянными магнитами 4 с возможностью линейного перемещения по двум взаимно перпендикулярным продольной и поперечной осям в плоскости, параллельной основанию 31, и выполнена из монокристаллического кремния в виде пластины с прямоугольными оптическими щелями 1, 25. Магниты 4 закреплены на основании 31 и крышке 5. Первые датчики положения каждой инерционной массы 35, 13 выполнены в виде пар, состоящих из излучателей 2, 6 и двухсегментных фотоприёмников 26, 24, оптические оси которых проходят через оптические щели 1, 25, излучатели 2, 6 и двухсегментные фотоприёмники 26, 24 закреплены на основании 31 и крышке 5. Вторые датчики положения выполнены в виде пар, состоящих из излучателей 37, 7 и фотоприемников 32, 16, оптические оси которых проходят рядом с краем инерционных масс 35, 13. Излучатели 2, 6, 37, 7 и фотоприемники 26, 24, 32, 16 обоих датчиков положения каждой инерционной массы 35, 13 закреплены в отверстиях на основании 31 и крышке 5, соответственно. На поверхности каждой инерционной массы 35, 13 параллельно поперечной оси напылены токопроводящие дорожки 36, 12, начала которых соединены между собой токопроводящими шинами 34, 14, а концы соединены токопроводящими шинами 39, 9. Токопроводящие шины 34, 14 токоподводами 33, 38 через упругие элементы подвеса 3 первой инерционной массы 35 соединены с выходом ключа 28, к первому входу которого подключен источник постоянного тока 22, а ко второму входу подключен выход первого компаратора 27, к первому входу которого подключены выход одного сегмента двухсегментного фотоприемника 26 первого датчика, а ко второму входу подключен выход второго сегмента. Излучатели 2, 37 датчиков положения первой инерционной массы 35 подключены к источнику постоянного тока 22, токопроводящие шины 14, 9 второй инерционной массы 13 токоподводами 15, 11 через упругие элементы подвеса 8 второй инерционной массы 13 соединены с выходом второго ключа 19, к первому входу которого подключен источник постоянного тока 22, а ко второму входу подключен выход второго компаратора 23, к первому входу которого подключены выход одного сегмента двухсегментного фотоприемника 24 второго датчика, а ко второму входу подключен выход второго сегмента двухсегментного фотоприемника 24 второго датчика, излучатели 6, 7 датчиков положения второй инерционной массы 13 подключены к источнику постоянного тока 22. Выходы первого и второго фотоприёмника 32 и 16 соединены с первым и вторым усилителями 30 и 17, соответственно, а также последовательно с первым и вторым амплитудными детекторами 29 и 18, соответственно. Входы АЦП 21 соединены с выходами первого и второго ключей 28 и 19, а также с выходами первого и второго амплитудных детекторов 29 и 18. Выходы АЦП 21 соединены со входом микроконтроллера 20. Перейти на страницу: 1 2 3
Другое по теме:
Разработка микропроцессорной системы Целью данного курсового проекта является углубление знаний по аппаратным принципам построения устройств микропроцессорной техники и приобретение практических навыков по разработке микропроцессорных систем и их программного обеспечения. Пр ...