µx=8·10-4 Н·с/м (mjux);
µy=8·10-4 Н·с/м (mjuy);x=5 Н/м (cx);y=5 Н/м(cy);
ωz=0.1°/с (omegaz);a=300·10-6 Н (Fa);m=100·10-6 м (Switch);пДС=5 В (Up);ДС=60·10-6 Н/В (kds);ДП=900 В/м (kdp);ОП=100 (kop);2=10-8 с (T2).
В данном случае собственная частота механической системы и постоянная времени колебательного звена будут равны
![]()
![]() ,(4.16)
,(4.16)
![]()
![]() c. (4.17)
c. (4.17)
Упрощённые схемы канала возбуждения и выходного канала данной модели представлены на рисунках 4.3 и 4.4, соответственно.
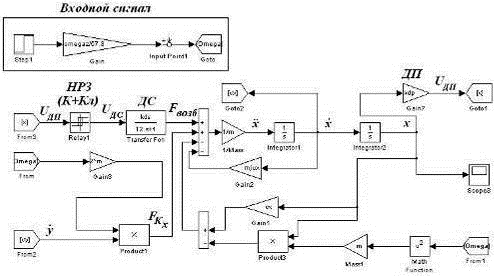
Рисунок 4.3 - Схема канала возбуждения автоколебательного ММГ
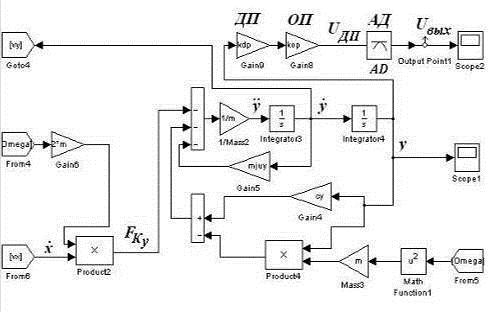
Рисунок 4.4 - Схема выходного канала автоколебательного ММГ
Схема двухмассового автоколебательного ММГ представлена на рисунке 4.5.
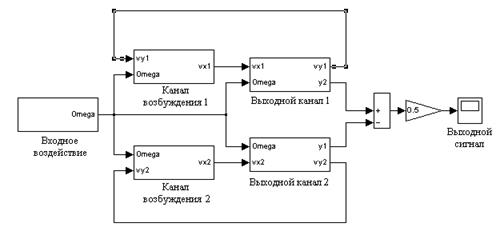
Рисунок 4.5 - Схема двухмассового автоколебательного ММГ
На рисунке 4.5 введены следующие обозначения: Omega - измеряемая угловая скорость; vx1 и vx2 - линейные скорости ИМ 1 и 2, соответственно, относительно оси x; vy1 и vy2 - линейные скорости ИМ 1 и 2, соответственно, относительно оси y; y1 и y2 - линейное смещение ИМ 1 и 2, соответственно, от положения равновесия относительно оси y.
Использование данной двухмассовой схемы позволяет избежать целого ряда погрешностей различной природы благодаря нахождению разности выходных сигналов двух противофазных выходных каналов. Перейти на страницу: 1 2
Другое по теме:
Диктофон В настоящее время до девяноста процентов всего потока информации воспринимается органами зрения человека. Поэтому важным направлением научной организации труда является увеличение части потока информации, воспринимаемой другими органами чувств и ...