Упрощённая модель ДУС основана на системе уравнений (4.6).
ПУ ЧЭ, являясь одним из основных элементов гироскопа, к которому прикладывается по различным осям возбуждающее воздействие Fвозб(x) и силы Кориолиса ![]()
![]() и
и ![]()
![]() , представляет собой инерционно-колебательные звенья, описываемое уравнениями
, представляет собой инерционно-колебательные звенья, описываемое уравнениями
![]()
![]() ,
,
![]()
![]() (4.8)
(4.8)
Реакцией на измеряемую угловую скорость ![]() является изменение положения ПУ вдоль выходной оси OY, относительно корпуса прибора.
является изменение положения ПУ вдоль выходной оси OY, относительно корпуса прибора.
Так как постоянная времени оптоэлектронного преобразователя пренебрежимо мала (не более 10-8 с.) по сравнению с другими постоянными времени системы, то ДП, могут быть описаны пропорциональными звеньями
![]()
![]() , (4.9)
, (4.9)
где kДП - коэффициент преобразования оптического преобразователя (kДП=900 В/м), kОП - коэффициент усиления оптического преобразователя (kОП =100, смотри п.3.3).
Усилители, стоящие после ДП, также могут быть описаны пропорциональными звеньями
![]()
![]() .(4.10)
.(4.10)
С ДП, стоящих на оси возбуждения OX, сигнал поступает на нелинейное релейное звено (НРЗ), пример характеристики которого представлен на рисунке 4.2. Это звено формируется на основе последовательно включённых компаратора и электронного ключевого устройства.
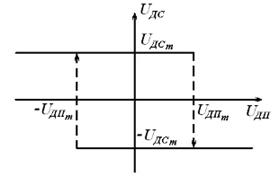
Рисунок 4.2 - Пример характеристики НРЗ.
В автоколебательном ММГ был использован магнитоэлектрический ДС, постоянная времени T2 которого должна быть учтена. Данный ДС должен быть описан, как апериодическое звено первого порядка. ДС магнитоэлектрического типа можно рассматривать, как активно-индуктивную нагрузку, включаемую на выходе стабилизированного источника тока или напряжения. В этом случае ДС может быть описан, как
![]()
![]() ,(4.11)
,(4.11)
где kДС - коэффициент преобразования ДС.
![]()
![]() (4.12)
(4.12)
![]()
![]() , (4.13)
, (4.13)
где L - индуктивность ДС, R - сопротивление ДС.
![]()
![]() (4.14)
(4.14)
где n - число токопроводящих дорожек на пластине (n=250, смотри п. 3.4.2), l - длина пластины (l=5·10-3 м, смотри п. 3.4.2), b0 - её ширина (b0=5·10-3 м, смотри п. 3.4.2), b - ширина токопроводящей дорожки (b=23,4·10-6 м, смотри п. 3.4.2).
![]()
![]() (4.15)
(4.15)
где ρ - удельное сопротивление материала токопроводящей дорожки (для алюминия ρ=0,0271·10-6 Ом·м), h - толщина слоя токопроводящих дорожек (h =10·10-6 м, смотри п. 3.4.2).
Тогда
![]()
![]() .
.
Динамика системы и её переходные функции могут быть исследованы с использованием модели этой системы в программной среде Simulink. При моделировании были использованы следующие значения параметров:=1.2·10-5 кг; Перейти на страницу: 1 2
Другое по теме:
Качество линейных непрерывных САУ и методы их оценки 310181 замкнутый линейный квадратичная интегральная ошибка Устойчивость является необходимым, но недостаточным условием работоспособности САУ. К ним предъявляют определенные требования качества. Наиболее полной характеристикой качества систем ...