Прежде всего, следует сказать, что довольно часто микроустройства изготавливают при помощи гальванотехники, используя никель (это особенно характерно для LIGA
технологии). А так как никель это ферромагнитный материал, то это стало первопричиной появления магнитных актюаторов.
Основным компонентом большинства актюаторов этого типа является тонкоплёночная структура пластины, которая поддерживает электролитический пермаллоевый участок, генерирующий механическую силу и вращающий момент при условии помещения его в магнитное поле. Как структурные пластины, так и поддерживающие балки сделаны из поликристаллических тонких плёнок. Механизм активации проиллюстрирован на рис 8. Когда внешнее магнитное поле равно нулю структурная пластина параллельна плоскости подложки. Когда внешнее магнитное поле Hвнеш, приложено нормально к плоскости структурной пластины, внутри пермаллоевого участка возникает вектор намагниченности М и он впоследствии взаимодействует с Hвнеш. Взаимодействие создаёт вращающий момент (Ммаг) и небольшую силу, воздействующую на свободный конец консольной балки при этом заставляя её изгибаться.
При приложении внешнего подмагничивания, пермаллоевый материал рассматривается как материал, имеющий постоянный плоскопараллельный вектор намагниченности с величиной равной намагниченности насыщения Мнас. При помещении во внешнее магнитное поле генерируется две компоненты силы. Величина обоих, как F1(которая действует на верхнюю грань), так и F2 (которая действует на нижнюю грань) рассчитывается следующим образом:
F1 = Мнас×W×T×H1
F2= Мнас×W×T×H2,
где H1и H2 напряжённость магнитного поля на верхней и нижней грани пластины (в текущей конфигурации H1 < H2). Величина H1и H2 линейно зависит от соответствующего расстояния до поверхности электромагнитного источника. Пластина вместе с пермаллоевым участком рассматривается как твёрдое тело так как она существенно толще консольной балки. Основываясь на этом предположении систему сил, упрощают, перемещая F1до совмещения с F2. Результатом является вращающий момент, действующий против часовой стрелки и сосредоточенная сила, воздействующая на нижнюю грань структурной пластины. Этот результат можно представить как:
Ммаг= F1×L×cosθ
F = F2 - F1
Вращающий момент всегда стремится уменьшить полную энергию в системе актюатора, выравниванием вектора намагниченности с силовыми линиями внешнего магнитного поля.
Фотография магнитного микроактюатора, полученная на сканирующем электронном микроскопе, представлена на рис. 5.
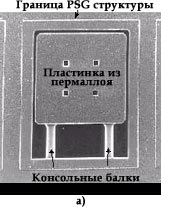
Рис. 5
Примером магнитного микроактюатора другой конструкции может служить линейный мотор, показанный на рис 6. Магнит, расположенный в канале, движется взад-вперёд при переключении тока в обмотках, то с одной, то с другой стороны канала.
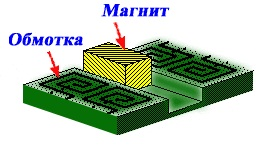
Рис. 6
Общая проблема, связанная с магнитными актюаторами, заключается в том, что обмотки двумерны (трёхмерные обмотки очень тяжело изготовить на микроуровне). Вдобавок ограничен выбор магнитного материала - выбираются только те материалы, которые легко обработать на микроуровне, и получается, что не всегда материал магнита выбирается оптимально. Во многом из-за этого магнитные актюаторы потребляют большое количество энергии и рассеивают много тепла. Следует отметить, что для изготовления микроскопических компонентов (размером до нескольких миллиметров) электростатические устройства обычно выгоднее магнитных, однако при более больших размерах магнитные устройства превосходят электростатические.
Другое по теме:
Построение вычислительных сетей на основе технологий CISCO Компания Horns&Hoofs, занимающаяся продажами товаров широкого потребления в регионе, занимает три корпуса. Все здания имеют различные заземления. Каждое здание имеет только одно заземление. Пол покрыт керамической плиткой, если тольк ...