В этом случае значение ошибки так же будет иметь синусоидальный характер:
График зависимости ошибки от времени имеет вид:
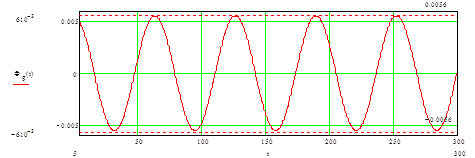 |
Т.к. амплитуда ошибки меньше Dvmax = 10 мм/c, то система регулирования удовлетворяет заданным критериям точности.
Корректировка системы происходит за счет изменения значения коэффициента ![]()
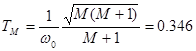
Для увеличения устойчивости, ЛАЧХ разомкнутой системы на частоте wм должна иметь значение: ![]() , где M=1.5-показатель колебательности
, где M=1.5-показатель колебательности
Зачение wм, находим поформулам:
 |
![]()
ЛАЧХ скорректированной системы имеет вид:
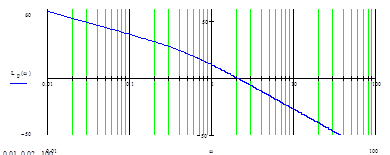
Временная характеристика переходного процесса, вызванного воздействием на систему функцией 1(t) имеет вид:
 |
Т.о. требование значения показателя колебательности системы M=1.5 выполняется.
Заключение
Под улучшением качества процесса регулирования, помимо повышения точности в типовых режимах, понимается изменение динамических свойств системы регулирования с целью получения необходимого запаса устойчивости и быстродействия. В этой проблеме основное значение имеет обеспечение запаса устойчивости. Это объясняется тем, что стремление снизить ошибки системы регулирования приводит, как правило, к необходимости использовать такие значения общего коэффициента усиления, при которых без принятия специальных мер система вообще оказывается неустойчивой.
При решении задачи повышения запаса устойчивости проектируемой системы регулирования прежде всего необходимо попытаться рациональным образом изменить ее параметры (коэффициенты передачи отдельных звеньев, постоянные времени и т. п.) так, чтобы удовлетворить требованиям качества регулирования, которые определяются критериями качества. При невозможности решить эту задачу в рамках имеющейся системы приходится идти на изменение ее структуры. Для этой цели обычно используется введение в систему регулирования так называемых корректирующих средств, которые должны изменить динамику всей системы в нужном направлении. К корректирующим средствам относятся, в частности, корректирующие звенья, представляющие собой динамические звенья с определенными передаточными функциями.
Для оценки качества любой системы регулирования, в том числе и следящей системы, необходимо знать ее точность, характеризуемую ошибками в некоторых типовых режимах, быстродействие, определяемое по способности системы работать при больших скоростях и ускорениях входного воздействия или по быстроте протекания переходных процессов, и запас устойчивости, показывающий склонность системы к колебаниям. В соответствии с этим можно говорить о критериях точности, критериях быстродействия и критериях запаса устойчивости. При использовании частотных критериев необходимо основываться на тех или иных частотных свойствах системы регулирования. Перейти на страницу: 1 2
Другое по теме:
Разработка технологии сборки и монтажа ячейки трехкоординатного цифрового преобразователя перемещения Рассматриваемая ячейка входит в трёх-координатного цифрового преобразователя перемещений. Преобразователь должен обеспечивать преобразование угловых координат со следующими точностными и динамическими характеристиками: - ...