В проекте используются электродвигатель постоянного тока с независимым возбуждением. Система уравнений для такого двигателя при управлении по цепи якоря имеет вид:
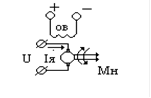
Рис.1
. Двигатель постоянного тока
Lя ![]() + rя×iя - Cе×W=U(9)
+ rя×iя - Cе×W=U(9)
См×iя – I ![]() =Mн (10)
=Mн (10)
где Lя и rя - индуктивность и сопротивление нагрузки якорной цепи;
iя - ток якоря;
I - момент инерции якоря;
Се и См - коэффициенты пропорциональности между скоростью вращения и противо-э.д.с и между током якоря и вращающим моментом.
Вводя оператор ![]() и решая уравнение относительно скорости вращения
и решая уравнение относительно скорости вращения ![]() , получим
, получим
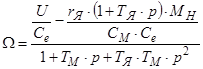 ;
;
Примем ![]() . Тогда получим:
. Тогда получим:
![]() ;
;
Данная зависимость представляет собой линеаризованные механические характеристики двигателя постоянного тока. Следовательно коэффициент ![]() может быть подсчитан по паспортным данным двигателя
может быть подсчитан по паспортным данным двигателя
![]() ;
;
где ![]() - номинальное напряжение двигателя;
- номинальное напряжение двигателя;
W0 - угловая скорость идеального холостого хода (при U=Uном и Mн=0);
Iном и Мном - номинальный ток якоря и вращающий момент.
Вычислим электромеханическую постоянную времени:
![]() ;
;
Подставим численные значения в уравнение зависимости ![]() :
:
![]() ;
;
Упростив уравнение ![]() , получим передаточную функцию двигателя:
, получим передаточную функцию двигателя:
![]() ;
;
Из уравнения видно, что коэффициент передачи двигателя ![]() .
.
Синтез корректирующего устройства.
Корректирующего звено вводится в систему регулирования, по средствам отрицательной обратной связи. Корректирующее устройство, представляет из себя идеальное безынерционное звено, с передаточной функцией:
![]() ;
;
Структурная схема САРВ имеет вид:
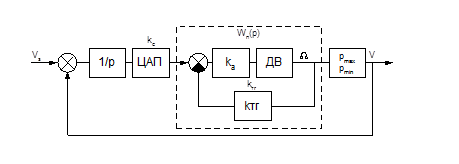
Рис.2.
Структурная схема САРВ
Передаточная функция разомкнутой системы имеет вид:
![]() ,
,
Где ![]() -коэффициент передачи ЦАП;
-коэффициент передачи ЦАП;
![]()
Радиус ![]() определяется как
определяется как
![]() = 80 мм =0.8 м.
= 80 мм =0.8 м.
 |
 |
Оценим ошибку, вызванную постоянным входным воздействием вида:
![]()
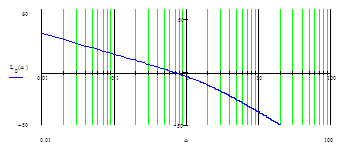
Добьемся требуемого качества установившегося режима. Система должна обеспечивать точность Dvmax = 10 мм/c при входном воздействии gmax=500 мм, отсюда можно найти суммарный коэффициент усиления всех звеньев системы.
![]()
ЛАЧХ должна располагаться выше контрольной точки Ak имеющая координаты(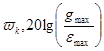 ) Перейти на страницу: 1 2
) Перейти на страницу: 1 2
Другое по теме:
Методы проектирования и моделирования усилителей Значительные изменения во многих областях науки и техники обусловлены развитием электроники. В настоящее время невозможно найти какую-либо отрасль промышленности, в которой не использовались бы электронные приборы. Одними из таких прибор ...