Как было уже отмечено в пункте 2.3, без введения дополнительных элементов описанный в предыдущем пункте ММГ (рисунок 3.8) является ММА с осью чувствительности вдоль продольной оси плоскости ИМ.
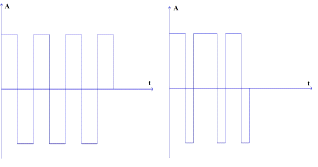
Для измерения ускорения может быть использован сигнал на выходе первого и второго ключей 27 и 32. На рисунке 4.11
а) представлен пример этого сигнала при отсутствии ускорения по продольной оси, на рисунке 4.11
б) - при наличии ускорения по продольной оси.
При воздействии на автоколебательный ММГ ускорения по продольной оси на первую инерционную массу 1 по продольной оси будет действовать сила инерции. Это приводит к смещению центра колебаний первой инерционной массы 1.
В итоге данные явления приведут к изменению длительности прямоугольных импульсов на выходе первого ключа 27 (рисунок 4.11 б). Аналогичным образом, но в противофазе, произойдёт смещение центра колебаний второй инерционной массы 2, что приведёт к изменению длительности прямоугольных импульсов на выходе второго ключа 32.
а) б)
Рисунок 4.11 - Сигналы на выходе первого и второго ключей а) при отсутствии ускорения по продольной оси; б) при наличии ускорения по продольной оси
По изменению длительности прямоугольных импульсов на выходе первого и второго ключа 27 и 32 можно определить измеряемое ускорение по продольной оси. Опишем подробнее обработка данного сигнала и извлечение полезной информации.
В данном случае можно использовать уравнение динамики (4.6) или упрощённое уравнение
![]() .(4.39)
.(4.39)
При выполнении условия медленности изменения входного воздействия возможно применения принципа разделения движения на медленную и колебательную составляющие. Применим преобразование Фурье и разобьём уравнение (4.39) на следующие два уравнения
![]()
![]() , (4.40)
, (4.40)
![]()
![]() , (4.41)
, (4.41)
где x0 - смещение центра колебаний, x* - координата собственных колебаний, Φ0 = Φ0(x0) - функция смещения, представляющая собой статическую характеристику, которая определяет зависимость между входной и выходной величинами заданной нелинейности при постоянных или медленно изменяющихся сигналах, k = -m.
В соответствии с , для вида нелинейности, представленного на рисунке 4.2,
![]()
![]() ,(4.42)
,(4.42)

 , (4.43)
, (4.43)
![]()
![]() (4.44)
(4.44)
Функция смещения может быть представлена, как
![]()
![]() ,(4.45)
,(4.45)
где
 .(4.46)
.(4.46)
Таким образом, наличие автоколебаний даёт возможность, используя линейную зависимость (4.45), представить нелинейное уравнение (4.40) в линейном виде
![]()
![]() , (4.47)
, (4.47)
Если принять, что входное воздействие фиксировано в некоторые моменты времени, то уравнение (4.47) можно представить, как
![]()
![]() .(4.48)
.(4.48)
Таким образом, в установившемся состоянии рассматриваемой системы смещение x0 центра колебаний ПУ пропорционально измеряемой входной величине ускорения
![]()
![]() (4.49)
(4.49)
В данном случае входной величиной является ускорение. Так как эта величина не определяет коэффициенты левой части уравнения (4.39), то она приведёт к смещению центра колебаний ПУ автоколебательной системы, которым является ИМ. В контуре прибора осуществляется преобразование ускорения в широтно модулированный сигнал Величина временной модуляции пропорциональна измеряемому воздействию. Диаграммы формирования сигналов показаны на рисунке 4.12.
Как было уже указано ранее, создание режима автоколебаний осуществляется путем введения в контур прибора нелинейного звена с известной статической характеристикой. В этом случае колебательной системой становится ПУ прибора, к которому приложено входное воздействие, формируемое в результате взаимодействия ММА с измеряемой физической величиной и компенсирующее воздействие, создаваемое ДС. Введение в контур прибора нелинейного звена приводит к формированию в цепи обратной связи биполярного электрического сигнала, под действием которого ПУ совершает гармоническое движение. Перейти на страницу: 1 2
Другое по теме:
Разработка передающего полукомплекта ТУ С увеличением расстояния передачи, объёма информации и числа контролируемых объектов особое значение приобретает необходимость сокращения затрат на линии связи, обеспечения качества передачи сигналов и быстродействия системы передачи. Эти пробл ...