q Регистр команд (Instruction Register), в котором хранится текущая команда. Разрядность регистра команд должна быть больше или равна 2.
q TAP controller. По сути, это конечный управляющий автомат для тестовой логики.
Как видно из схемы, тестовая логика предоставляет возможность выбирать путь прохождения данных от TDI к TDO: либо через регистр команд (Instruction Register), либо через регистр данных (Data Register). Регистром данных в каждый момент времени может быть один из следующих регистров:
q Последовательный сдвиговый регистр граничного сканирования (Boundary-Scan register).
q Какой-либо внутренний регистр, предусмотренный разработчиком устройства (Internal register).
q Регистр обхода (Bypass register).
q Идентификационный регистр (Identification register).
Рассмотрим регистр сканирования. Ячейки граничного сканирования (Boundary-Scan cells) подразделяются на два типа: входные (размещаются на тех первичных входах устройства, где временной фактор критичен – например, на входе синхронизации) и обычные. Схема входной ячейки показана на рис. 5.
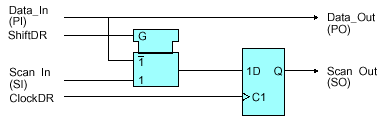
Рисунок 5.
Как видно из этой схемы, сигнал проходит по линии данных без задержек. Однако, там где это возможно на входных линиях, а также на всех выходных линиях располагают обычные ячейки. Структура типичной ячейки граничного сканирования представлена на рис. 6.
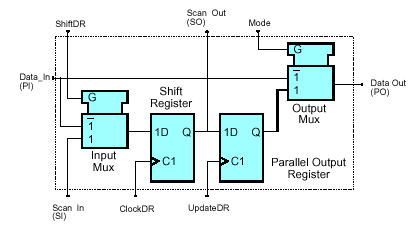
Рисунок 6
Рассматриваемая ячейка состоит из двух D-триггеров, работающих по прямому фронту, двух мультиплексоров “2-в-1”, четырех входов и двух выходов. Назначение структурных элементов схемы:
q Data_In и Data_Out – вход и выход (относительно ячейки) линии данных, на которую эта ячейка и помещена. (PI – parallel input, PO – parallel output).
q Scan In и Scan Out – соответственно, вход и выход сканируемых данных (SI – serial scan input, SO – serial scan output). Т.е. на SI данные приходят с SO предыдущей ячейки (либо с TDI, если это первая ячейка в пути), проходят через первый D-триггер и выходят на SO, чтобы попасть на SI следующей ячейки (или на TDO, если это последняя ячейка в пути).
q ShiftDR – определяет источник информации для первого D-триггера: Data_In (режим Capture) либо Scan In (режим Shift).
q Mode – определяет, что пропускать на линию данных Data_Out: сигнал с Data_In (режим Normal) либо сигнал со второго D-триггера (режим Update).
q ClockDR – синхронизирующий вход первого D-триггера, т.е. для режимов Capture и Shift.
q UpdateDR – синхронизирующий вход второго D-триггера (режим Update)
Ниже приведена таблица режимов функционирования ячейки:
| Режим | ShiftDR | Mode | Функционирование |
| NORMAL | - | 0 | PI ® PO |
| CAPTURE | 0 | - | PI ® SO по фронту на ClockDR |
| SHIFT | 1 | - | SI ® SO по фронту на ClockDR |
| UPDATE | - | 1 | SO ® PO по фронту на UpdateDR |
Другое по теме:
Суммирующий счетчик 1) Используя параметры эквивалентного логического элемента, разработанного в предыдущем КП по курсу «Компьютерное моделирование интегральных приборов», спроектировать схему триггера с динамическим управлением (фронтом или срезом синхросигнала) в ...