L(ω2)=L(1.2)=-35,743 дБ
Последние две величины находятся из выражения для Lисх(w).
Найденное по формуле значение ω1=0.098
ЛАЧХ корректирующего устройства с характеристикой Lk(w) соответствует функция:
где:
![]()
Общая передаточная функция разомкнутой системы с корректирующим звеном последовательного типа имеет вид:
Далее воспользуемся функцией zpk(z, р, К), где z и р - векторы из нулей и полюсов, a Kd - обобщенный коэффициент передачи, sys - любое имя присваиваемое модели. Тогда запись в системе Matlab примет вид:
sys1=zpk(,,kd)
Zero/pole/gain:
58.2 (s+2.5) (s+0.4762)
-------------------------------------------------
s (s+7.143) (s+4.167) (s+25) (s+0.4762) (s+0.097)
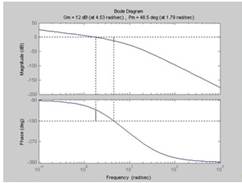
Рис. 1.6
6.
Для нахождения переходных характеристик замкнутой системы с корректирующим звеном предварительно сформируем модель в пространстве состояний. Передаточная функция замкнутой системы имеет вид:
![]()

Для нахождения Ф(s) воспользуемся следующей последовательностью команд:
>>sys1=zpk(,,kd)
Zam_ck=inv(l+sysl)*sysl - находится передаточная функция замкнутой системы. (Не оптимальная форма т.к. при такой последовательности команд не производится упрощение за счет сокращения одинаковых элементов числителя и знаменателя. В тоже время на результат дальнейшего расчета это не влияет).
>>Zam_ck=inv(1+sys1)*sys1
Переходная характеристика (рис. 1.7 ) находится с помощью функций: 0,05
Из рассмотрения рис. 1.7 видно, что параметры по заданию выполняются.
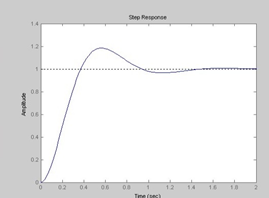
Рис 1.7
Для устранения неоптимальности записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck. Перейти на страницу: 1 2 3 4
Другое по теме:
Разработка и описание работы устройства на PIC-контроллере Однокристальные микроконтроллеры стремительно занимают ведущее место в электронной аппаратуре. И если каких-нибудь десять лет назад они могли быть использованы при проектировании только профессионалами — слишком много требовалось д ...