Задание:
1) Найти передаточную функцию разомкнутой системы W(s) и передаточную функцию замкнутой системы Ф(s), ![]() ;
;
2) Построить область устойчивости системы в плоскости общего коэффициента передачи К = К1К2К3 и постоянной времени Т2 при заданных значения Т1 и Т3. Найти граничное значение ![]() при заданном значении Т2, при котором система выходит на границу устойчивости.
при заданном значении Т2, при котором система выходит на границу устойчивости.
3) Построить графики логарифмических амплитудной и фазовой частотных характеристик L(w) и φ(w) при значении коэффициента передачи K=0,7K’.
4) Оценить запасы устойчивости по модулю ∆L и фазе ∆ φ, величину ошибки по скорости еск при v(t) = v1t и f= 0, время переходного процесса tp и перерегулирование σ в исходной системе при K=0,7K’.
5) Если исходная система не удовлетворяет заданным в таблице 1 показателям качества tp, σ, еск (хотя бы одному из них) или имеет малые запасы устойчивости, то провести коррекцию системы (последовательного или параллельного типа) и найти передаточную функцию корректирующего устройства.
6) Вычислить в скорректированной системе переходный процесс на выходе y(t) при подаче на вход единичной ступенчатой функции v(t)=1(t)( f= 0). Найти tp, σ по переходному процессу и сравнить их с требуемым по заданию.
Исходные данные:
Структура исследуемой замкнутой линейной непрерывной САУ представлена на рис. 1.1, где v(t)- управляющее воздействие, (f)- возмущающее воздействие, е(t)- сигнал ошибки, y(t)- выходной сигнал. Значения параметров Т1 Т2, Т3 заданы в табл. 1. Размерность Т1 Т2, Т3 в секундах, общий коэффициент передачи К = К1К2К3 имеет размерность 1/с, в табл. 1 заданы также желаемые показатели качества системы: максимальная ошибка по скорости еск при скачке по скорости v(t) = v1t и f= 0, время переходного процесса tп.п в секундах, и перерегулирование у в процентах.
Таблица 1. Структура исследуемой замкнутой линейной непрерывной САУ
| Номер варианта | v1 | еск | tп.п | σ | Т1× | Т2× | Т3 |
| 10 | 1,4 | 0,04 | 2,5 | 10 | 0,33 | 1,9 | 5 |
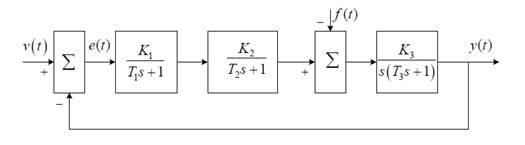
Рисунок 1.1
Выполнение:
1.
Требуемые передаточные функции находят с использованием правил структурных преобразований. Коротко сформулируем основные правила:
— Передаточные функции последовательно соединенных звеньев перемножаются.
— Передаточные функции параллельно соединенных звеньев складываются.
Передаточная функция системы с обратной связью - это передаточная функция замкнутой системы, которая определяется по формуле:
![]()
![]() (по условию)
(по условию)
Передаточная функция разомкнутой системы W(s) = Y(s)/U(s) при f= 0, e = u (т.е. разомкнута главная обратная связь) определится выражением:
![]()
![]()
где обозначим К = К1К2К3,
![]() 0,03135
0,03135
![]() 1,12127
1,12127
![]() 5,223
5,223
![]()
Главная передаточная функция или передаточная функция замкнутой системы при f = 0: Перейти на страницу: 1 2 3 4
Другое по теме:
Разработка технологии сборки и монтажа ячейки трехкоординатного цифрового преобразователя перемещения Рассматриваемая ячейка входит в трёх-координатного цифрового преобразователя перемещений. Преобразователь должен обеспечивать преобразование угловых координат со следующими точностными и динамическими характеристиками: - ...