В данной курсовой работе в качестве метода синтеза применяется метод сопряженных градиентов. В группе данных методов процедура вычисления направления поиска не предполагает решения каких либо СЛАУ. Эти методы принципиально отличаются от методов Ньютна и квазиньютоновских методов.
Рассмотрим задачу поиска минимума квадратичной функции вида:
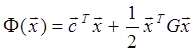
с,G - вектор и полноопределенная матрица, независящие от вектора ![]() .
.
Предполагается, что нам известно к-тое приближение в точке минимума![]() и (к+1) линейно независимых векторов
и (к+1) линейно независимых векторов ![]() .
.
Будем искать точку минимума целевой функции Ф(![]() ) на линейном множестве векторов
) на линейном множестве векторов ![]() +
+![]() Рк, где Рк – (к+1)-мерное множество, образованное линейно независимыми векторами.
Рк, где Рк – (к+1)-мерное множество, образованное линейно независимыми векторами.
Множества, образованные вида ![]() +
+![]() Рк называются линейными многообразиями.
Рк называются линейными многообразиями.
Задача сводится к нахождению точки минимума Ф(![]() ) на этом линейном многообразии.
) на этом линейном многообразии.
Для решения этой задачи сначала вводится матрица Рк=> Введение такой матрицы позволяет сформулировать задачу поиска минимума функции Ф(![]() ) на многообразии
) на многообразии ![]() +
+![]() Рк следующим образом: найти
Рк следующим образом: найти ![]()
То есть надо найти вектор ![]() , таким образом, чтобы точка
, таким образом, чтобы точка ![]()
![]() была бы точкой минимума функции
была бы точкой минимума функции ![]() .
.
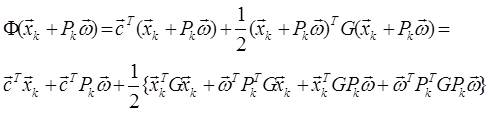
Для решения этой задачи необходимо сначала в функцию Ф(х) вместо ![]()
![]() , затем продифференцировать получившуюся функцию по вектору
, затем продифференцировать получившуюся функцию по вектору ![]() , приравнять результат к нулю и оттуда выразить вектор
, приравнять результат к нулю и оттуда выразить вектор![]() , который является решением задачи.
, который является решением задачи.

Если есть функция
![]() , то
, то ![]()

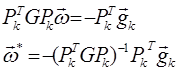
Тогда точка минимума
![]() (1)
(1)
Формулу (1) можно рассматривать как формулу рекуррентного расчета точки ![]() в классических методах спуска. Другими словами, формула (1) описывает процедуру пошаговой минимизации квадратичной функции Ф(х).
в классических методах спуска. Другими словами, формула (1) описывает процедуру пошаговой минимизации квадратичной функции Ф(х).
Формула (1) обладает рядом свойств:
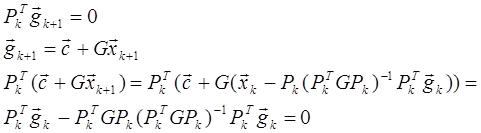
 ,
,
то есть каждая компонента должна быть равна нулю
Так как предполагается, что все точки xj при j=1,к рассчитывается по формуле (1), то справедливо следующее свойство:
![]() i>j Перейти на страницу: 1 2 3 4
i>j Перейти на страницу: 1 2 3 4
Другое по теме:
Разработка технологии сборки и монтажа ячейки трехкоординатного цифрового преобразователя перемещения Рассматриваемая ячейка входит в трёх-координатного цифрового преобразователя перемещений. Преобразователь должен обеспечивать преобразование угловых координат со следующими точностными и динамическими характеристиками: - ...